 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResolution-robust Large Mask Inpainting with Fourier Convolutions
Sep 15, 2021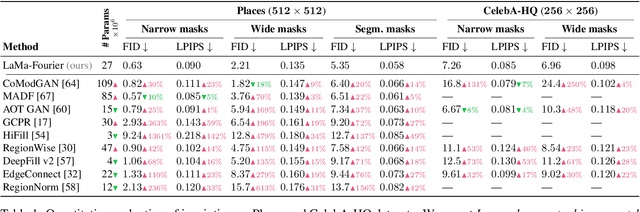
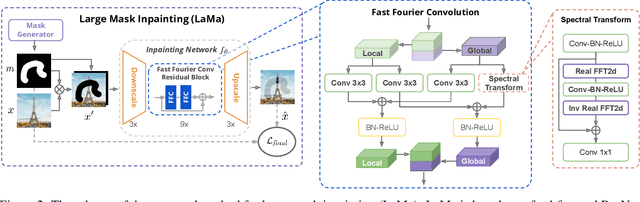
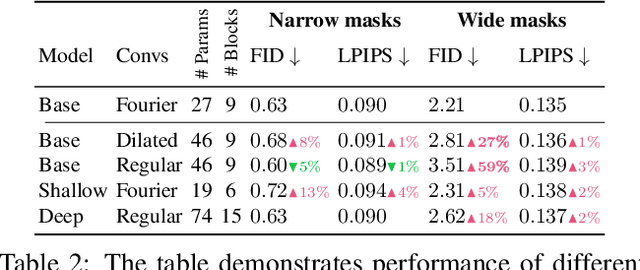
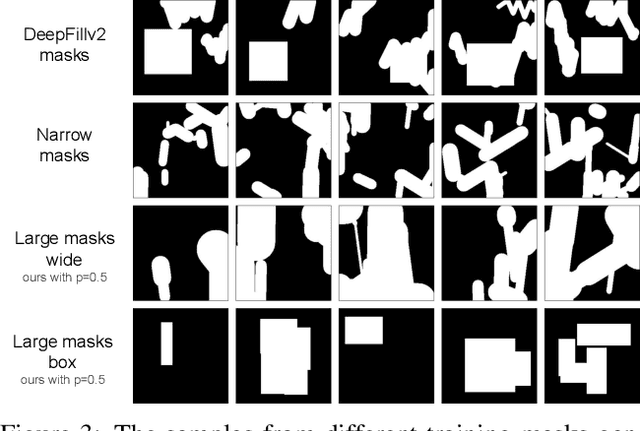
Modern image inpainting systems, despite the significant progress, often struggle with large missing areas, complex geometric structures, and high-resolution images. We find that one of the main reasons for that is the lack of an effective receptive field in both the inpainting network and the loss function. To alleviate this issue, we propose a new method called large mask inpainting (LaMa). LaMa is based on i) a new inpainting network architecture that uses fast Fourier convolutions, which have the image-wide receptive field; ii) a high receptive field perceptual loss; and iii) large training masks, which unlocks the potential of the first two components. Our inpainting network improves the state-of-the-art across a range of datasets and achieves excellent performance even in challenging scenarios, e.g. completion of periodic structures. Our model generalizes surprisingly well to resolutions that are higher than those seen at train time, and achieves this at lower parameter&compute costs than the competitive baselines. The code is available at https://github.com/saic-mdal/lama.
DeepLandscape: Adversarial Modeling of Landscape Video
Aug 21, 2020
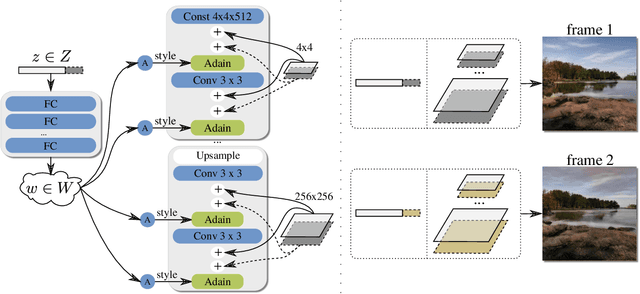
We build a new model of landscape videos that can be trained on a mixture of static landscape images as well as landscape animations. Our architecture extends StyleGAN model by augmenting it with parts that allow to model dynamic changes in a scene. Once trained, our model can be used to generate realistic time-lapse landscape videos with moving objects and time-of-the-day changes. Furthermore, by fitting the learned models to a static landscape image, the latter can be reenacted in a realistic way. We propose simple but necessary modifications to StyleGAN inversion procedure, which lead to in-domain latent codes and allow to manipulate real images. Quantitative comparisons and user studies suggest that our model produces more compelling animations of given photographs than previously proposed methods. The results of our approach including comparisons with prior art can be seen in supplementary materials and on the project page https://saic-mdal.github.io/deep-landscape
Learning State Representations in Complex Systems with Multimodal Data
Nov 30, 2018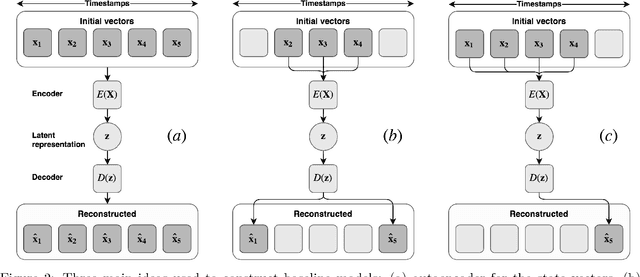
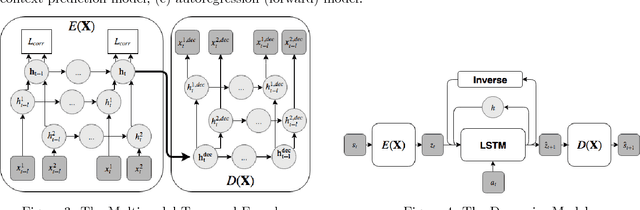
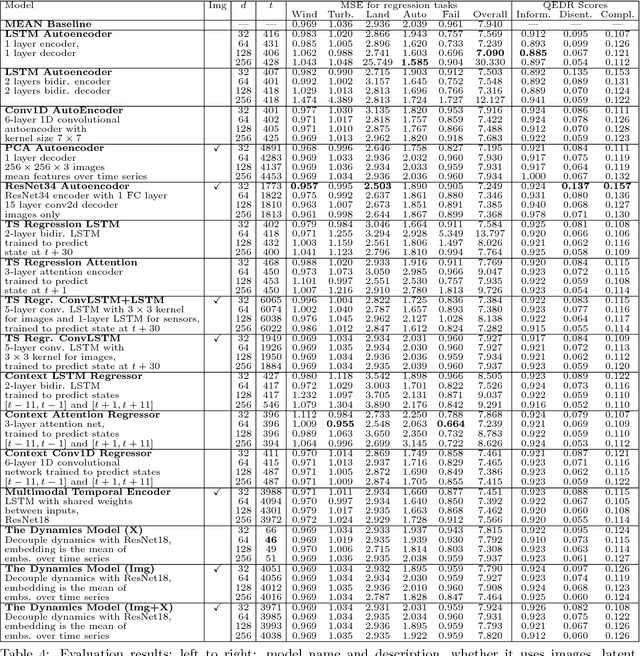
Representation learning becomes especially important for complex systems with multimodal data sources such as cameras or sensors. Recent advances in reinforcement learning and optimal control make it possible to design control algorithms on these latent representations, but the field still lacks a large-scale standard dataset for unified comparison. In this work, we present a large-scale dataset and evaluation framework for representation learning for the complex task of landing an airplane. We implement and compare several approaches to representation learning on this dataset in terms of the quality of simple supervised learning tasks and disentanglement scores. The resulting representations can be used for further tasks such as anomaly detection, optimal control, model-based reinforcement learning, and other applications.