 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Network-based Multi-agent Reinforcement Learning for Resilient Distributed Coordination of Multi-Robot Systems
Mar 19, 2024


Existing multi-agent coordination techniques are often fragile and vulnerable to anomalies such as agent attrition and communication disturbances, which are quite common in the real-world deployment of systems like field robotics. To better prepare these systems for the real world, we present a graph neural network (GNN)-based multi-agent reinforcement learning (MARL) method for resilient distributed coordination of a multi-robot system. Our method, Multi-Agent Graph Embedding-based Coordination (MAGEC), is trained using multi-agent proximal policy optimization (PPO) and enables distributed coordination around global objectives under agent attrition, partial observability, and limited or disturbed communications. We use a multi-robot patrolling scenario to demonstrate our MAGEC method in a ROS 2-based simulator and then compare its performance with prior coordination approaches. Results demonstrate that MAGEC outperforms existing methods in several experiments involving agent attrition and communication disturbance, and provides competitive results in scenarios without such anomalies.
Towards a Digital Twin Framework in Additive Manufacturing: Machine Learning and Bayesian Optimization for Time Series Process Optimization
Feb 27, 2024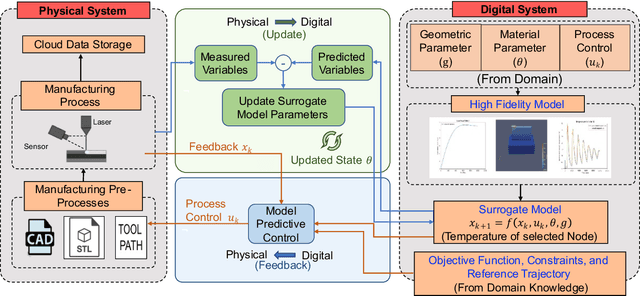
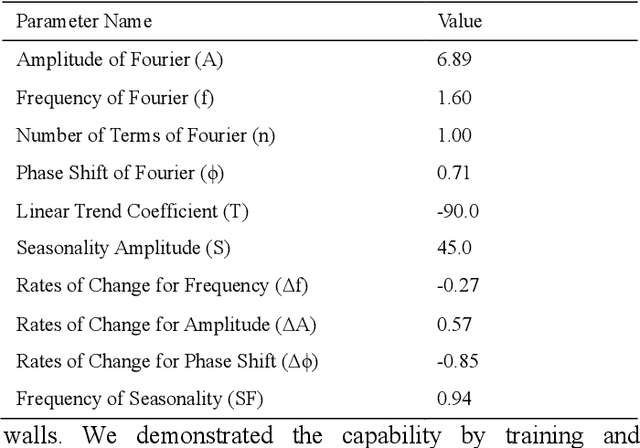
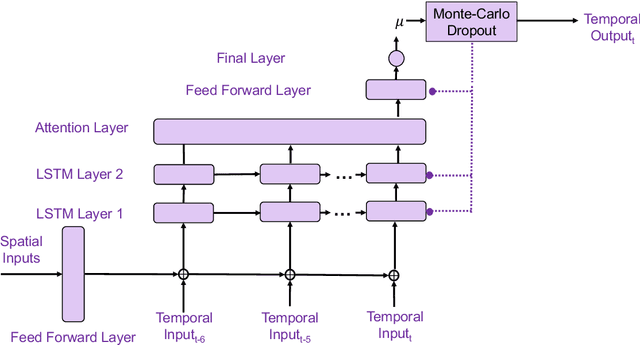
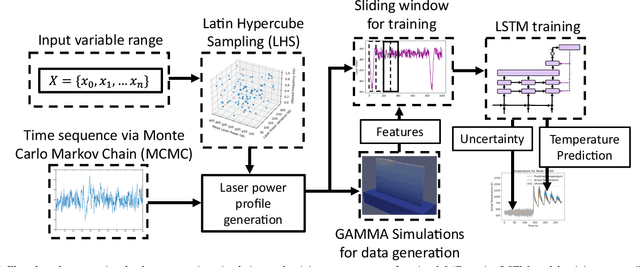
Laser-directed-energy deposition (DED) offers advantages in additive manufacturing (AM) for creating intricate geometries and material grading. Yet, challenges like material inconsistency and part variability remain, mainly due to its layer-wise fabrication. A key issue is heat accumulation during DED, which affects the material microstructure and properties. While closed-loop control methods for heat management are common in DED research, few integrate real-time monitoring, physics-based modeling, and control in a unified framework. Our work presents a digital twin (DT) framework for real-time predictive control of DED process parameters to meet specific design objectives. We develop a surrogate model using Long Short-Term Memory (LSTM)-based machine learning with Bayesian Inference to predict temperatures in DED parts. This model predicts future temperature states in real time. We also introduce Bayesian Optimization (BO) for Time Series Process Optimization (BOTSPO), based on traditional BO but featuring a unique time series process profile generator with reduced dimensions. BOTSPO dynamically optimizes processes, identifying optimal laser power profiles to attain desired mechanical properties. The established process trajectory guides online optimizations, aiming to enhance performance. This paper outlines the digital twin framework's components, promoting its integration into a comprehensive system for AM.
From Warfighting Needs to Robot Actuation: A Complete Rapid Integration Swarming Solution
Apr 15, 2023



Swarm robotics systems have the potential to transform warfighting in urban environments, but until now have not seen large-scale field testing. We present the Rapid Integration Swarming Ecosystem (RISE), a platform for future multi-agent research and deployment. RISE enables rapid integration of third-party swarm tactics and behaviors, which was demonstrated using both physical and simulated swarms. Our physical testbed is composed of more than 250 networked heterogeneous agents and has been extensively tested in mock warfare scenarios at five urban combat training ranges. RISE implements live, virtual, constructive simulation capabilities to allow the use of both virtual and physical agents simultaneously, while our "fluid fidelity" simulation enables adaptive scaling between low and high fidelity simulation levels based on dynamic runtime requirements. Both virtual and physical agents are controlled with a unified gesture-based interface that enables a greater than 150:1 agent-to-operator ratio. Through this interface, we enable efficient swarm-based mission execution. RISE translates mission needs to robot actuation with rapid tactic integration, a reliable testbed, and efficient operation.
* 58 pages, 29 figures. Published in Field Robotics
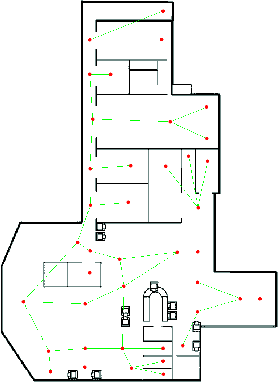
Attrition-Aware Adaptation for Multi-Agent Patrolling
Apr 03, 2023Multi-agent patrolling is a key problem in a variety of domains such as intrusion detection, area surveillance, and policing which involves repeated visits by a group of agents to specified points in an environment. While the problem is well-studied, most works either do not consider agent attrition or impose significant communication requirements to enable adaptation. In this work, we present the Adaptive Heuristic-based Patrolling Algorithm, which is capable of adaptation to agent loss using minimal communication by taking advantage of Voronoi partitioning. Additionally, we provide new centralized and distributed mathematical programming formulations of the patrolling problem, analyze the properties of Voronoi partitioning, and show the value of our adaptive heuristic algorithm by comparison with various benchmark algorithms using a realistic simulation environment based on the Robot Operating System (ROS) 2.