 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Warfighting Needs to Robot Actuation: A Complete Rapid Integration Swarming Solution
Apr 15, 2023



Swarm robotics systems have the potential to transform warfighting in urban environments, but until now have not seen large-scale field testing. We present the Rapid Integration Swarming Ecosystem (RISE), a platform for future multi-agent research and deployment. RISE enables rapid integration of third-party swarm tactics and behaviors, which was demonstrated using both physical and simulated swarms. Our physical testbed is composed of more than 250 networked heterogeneous agents and has been extensively tested in mock warfare scenarios at five urban combat training ranges. RISE implements live, virtual, constructive simulation capabilities to allow the use of both virtual and physical agents simultaneously, while our "fluid fidelity" simulation enables adaptive scaling between low and high fidelity simulation levels based on dynamic runtime requirements. Both virtual and physical agents are controlled with a unified gesture-based interface that enables a greater than 150:1 agent-to-operator ratio. Through this interface, we enable efficient swarm-based mission execution. RISE translates mission needs to robot actuation with rapid tactic integration, a reliable testbed, and efficient operation.
* 58 pages, 29 figures. Published in Field Robotics
DeepNAG: Deep Non-Adversarial Gesture Generation
Nov 18, 2020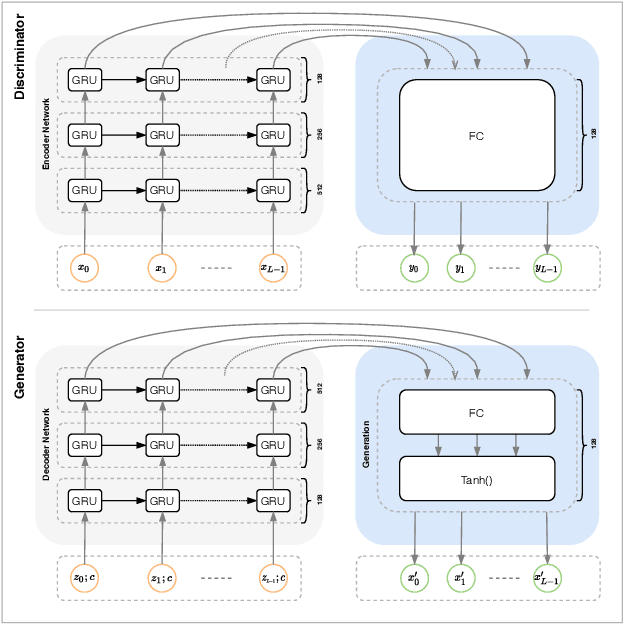
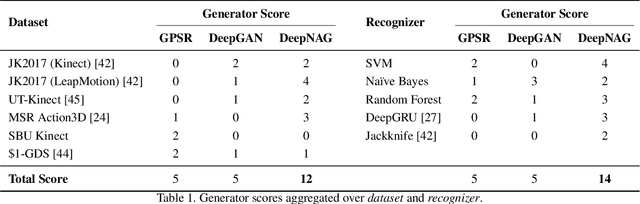
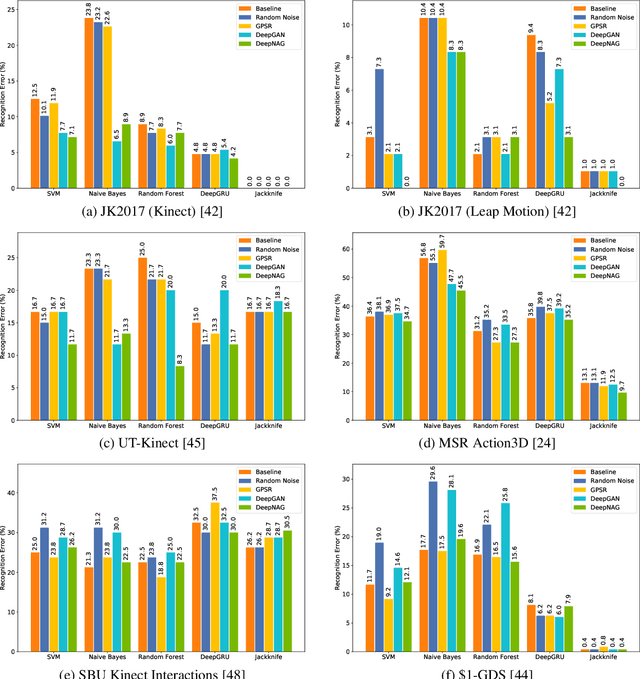
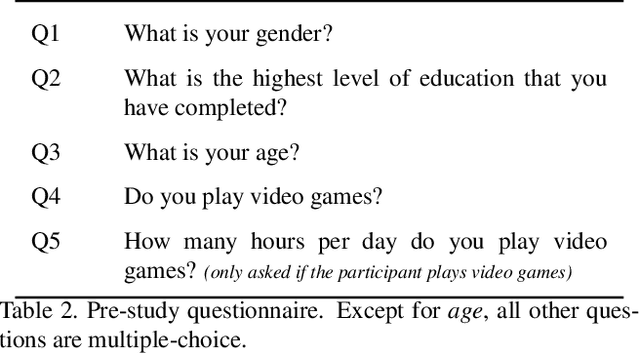
Synthetic data generation to improve classification performance (data augmentation) is a well-studied problem. Recently, generative adversarial networks (GAN) have shown superior image data augmentation performance, but their suitability in gesture synthesis has received inadequate attention. Further, GANs prohibitively require simultaneous generator and discriminator network training. We tackle both issues in this work. We first discuss a novel, device-agnostic GAN model for gesture synthesis called DeepGAN. Thereafter, we formulate DeepNAG by introducing a new differentiable loss function based on dynamic time warping and the average Hausdorff distance, which allows us to train DeepGAN's generator without requiring a discriminator. Through evaluations, we compare the utility of DeepGAN and DeepNAG against two alternative techniques for training five recognizers using data augmentation over six datasets. We further investigate the perceived quality of synthesized samples via an Amazon Mechanical Turk user study based on the HYPE benchmark. We find that DeepNAG outperforms DeepGAN in accuracy, training time (up to 17x faster), and realism, thereby opening the door to a new line of research in generator network design and training for gesture synthesis. Our source code is available at https://www.deepnag.com.