 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Scalable Real-Time Trajectory Planning Framework for Urban Air Mobility
Jun 20, 2023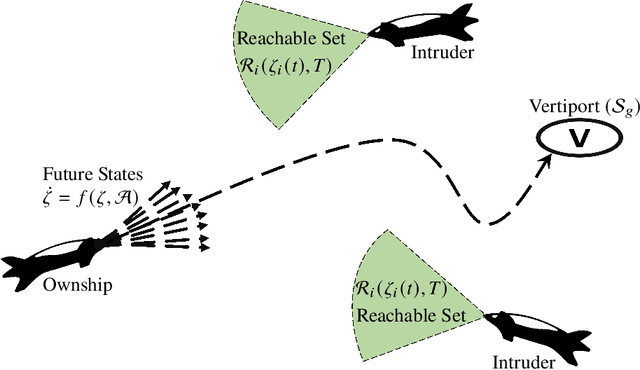

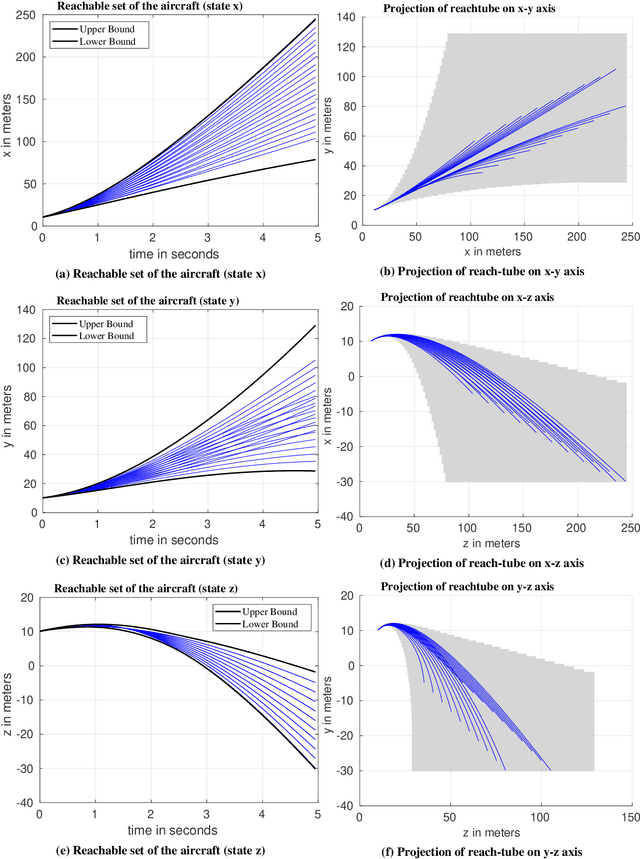
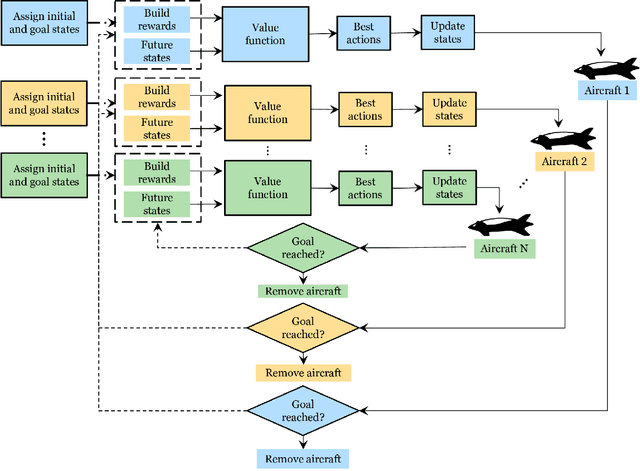
This paper presents a real-time trajectory planning framework for Urban Air Mobility (UAM) that is both safe and scalable. The proposed framework employs a decentralized, free-flight concept of operation in which each aircraft independently performs separation assurance and conflict resolution, generating safe trajectories by accounting for the future states of nearby aircraft. The framework consists of two main components: a data-driven reachability analysis tool and an efficient Markov Decision Process (MDP) based decision maker. The reachability analysis over-approximates the reachable set of each aircraft through a discrepancy function learned online from simulated trajectories. The decision maker, on the other hand, uses a 6-degrees-of-freedom guidance model of fixed-wing aircraft to ensure collision-free trajectory planning. Additionally, the proposed framework incorporates reward shaping and action shielding techniques to enhance safety performance. The proposed framework is evaluated through simulation experiments involving up to 32 aircraft in a UAM setting, with performance measured by the number of Near Mid Air Collisions (NMAC) and computational time. The results demonstrate the safety and scalability of the proposed framework.
Data-Driven Measurement Models for Active Localization in Sparse Environments
May 31, 2018



We develop an algorithm to explore an environment to generate a measurement model for use in future localization tasks. Ergodic exploration with respect to the likelihood of a particular class of measurement (e.g., a contact detection measurement in tactile sensing) enables construction of the measurement model. Exploration with respect to the information density based on the data-driven measurement model enables localization. We test the two-stage approach in simulations of tactile sensing, illustrating that the algorithm is capable of identifying and localizing objects based on sparsely distributed binary contacts. Comparisons with our method show that visiting low probability regions lead to acquisition of new information rather than increasing the likelihood of known information. Experiments with the Sphero SPRK robot validate the efficacy of this method for collision-based estimation and localization of the environment.
* 10 pages
Autonomous Visual Rendering using Physical Motion
Sep 08, 2017
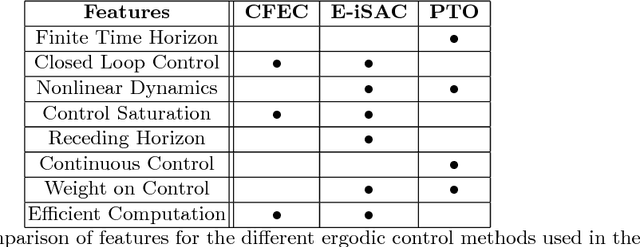
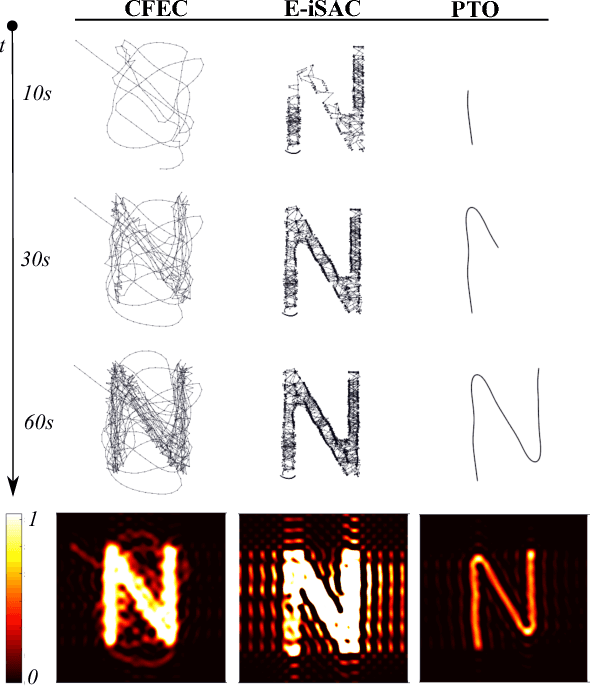
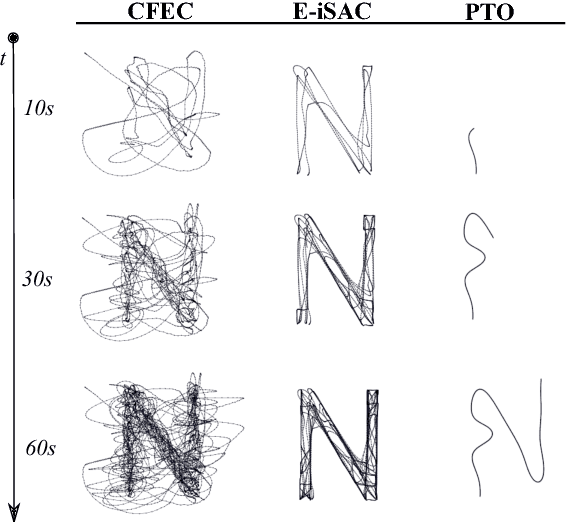
This paper addresses the problem of enabling a robot to represent and recreate visual information through physical motion, focusing on drawing using pens, brushes, or other tools. This work uses ergodicity as a control objective that translates planar visual input to physical motion without preprocessing (e.g., image processing, motion primitives). % or human-generated training data (i.e., machine learning). We achieve comparable results to existing drawing methods, while reducing the algorithmic complexity of the software. We demonstrate that optimal ergodic control algorithms with different time-horizon characteristics (infinitesimal, finite, and receding horizon) can generate qualitatively and stylistically different motions that render a wide range of visual information (e.g., letters, portraits, landscapes). In addition, we show that ergodic control enables the same software design to apply to multiple robotic systems by incorporating their particular dynamics, thereby reducing the dependence on task-specific robots. Finally, we demonstrate physical drawings with the Baxter robot.
* 16 pages, to appear in Proceedings of the Workshop on the Algorithmic Foundations of Robotics (WAFR), 2016
Real-time Dynamic-Mode Scheduling Using Single-Integration Hybrid Optimization for Linear Time-Varying Systems
Aug 31, 2017



This paper considers the problem of real-time mode scheduling in linear time-varying switched systems subject to a quadratic cost functional. The execution time of hybrid control algorithms is often prohibitive for real-time applications and typically may only be reduced at the expense of approximation accuracy. We address this trade-off by taking advantage of system linearity to formulate a projection-based approach so that no simulation is required during open-loop optimization. A numerical example shows how the proposed open-loop algorithm outperforms methods employing common numerical integration techniques. Additionally, we follow a receding-horizon scheme to apply real-time closed-loop hybrid control to a customized experimental setup, using the Robot Operating System (ROS). In particular, we demonstrate---both in Monte-Carlo simulation and in experiment---that optimal hybrid control efficiently regulates a cart and suspended mass system in real time.
Real-Time Area Coverage and Target Localization using Receding-Horizon Ergodic Exploration
Aug 28, 2017
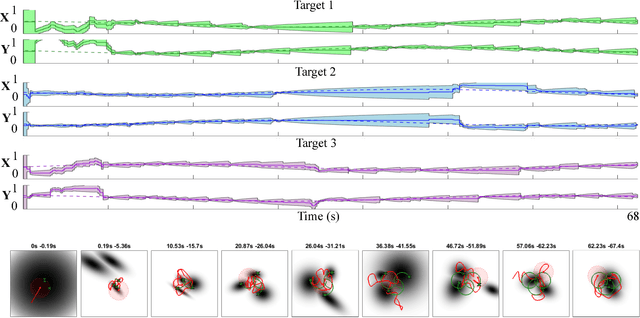
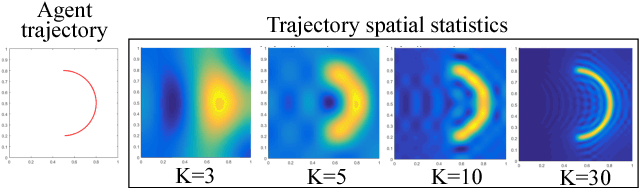
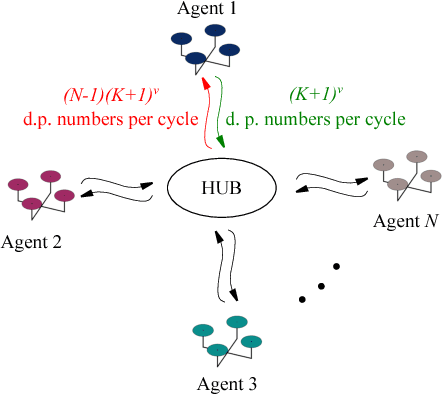
Although a number of solutions exist for the problems of coverage, search and target localization---commonly addressed separately---whether there exists a unified strategy that addresses these objectives in a coherent manner without being application-specific remains a largely open research question. In this paper, we develop a receding-horizon ergodic control approach, based on hybrid systems theory, that has the potential to fill this gap. The nonlinear model predictive control algorithm plans real-time motions that optimally improve ergodicity with respect to a distribution defined by the expected information density across the sensing domain. We establish a theoretical framework for global stability guarantees with respect to a distribution. Moreover, the approach is distributable across multiple agents, so that each agent can independently compute its own control while sharing statistics of its coverage across a communication network. We demonstrate the method in both simulation and in experiment in the context of target localization, illustrating that the algorithm is independent of the number of targets being tracked and can be run in real-time on computationally limited hardware platforms.