 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Task Execution using Active Parameter Identification with the Baxter Research Robot
Sep 11, 2017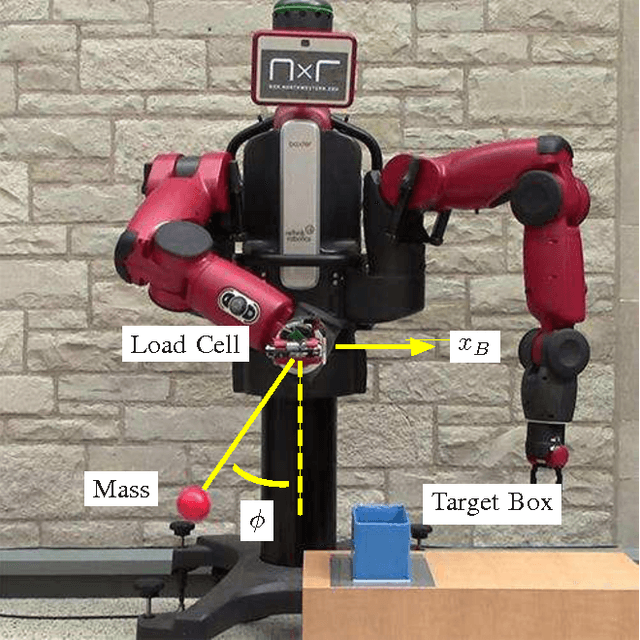
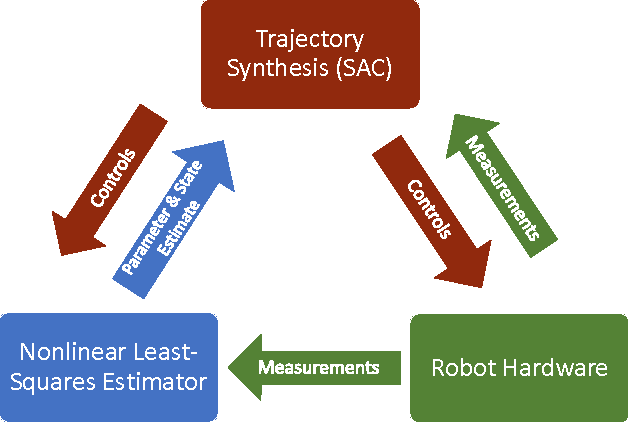
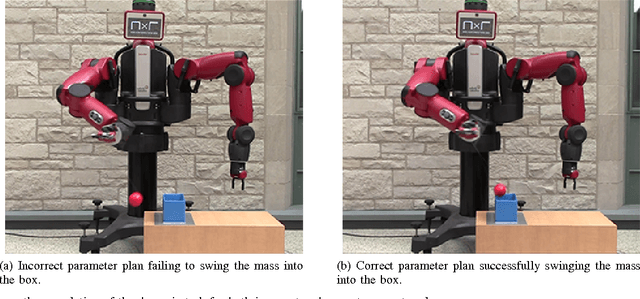
This paper presents experimental results from real-time parameter estimation of a system model and subsequent trajectory optimization for a dynamic task using the Baxter Research Robot from Rethink Robotics. An active estimator maximizing Fisher information is used in real-time with a closed-loop, non-linear control technique known as Sequential Action Control. Baxter is tasked with estimating the length of a string connected to a load suspended from the gripper with a load cell providing the single source of feedback to the estimator. Following the active estimation, a trajectory is generated using the trep software package that controls Baxter to dynamically swing a suspended load into a box. Several trials are presented with varying initial estimates showing that estimation is required to obtain adequate open-loop trajectories to complete the prescribed task. The result of one trial with and without the active estimation is also shown in the accompanying video.
* 7 pages
Trajectory Synthesis for Fisher Information Maximization
Sep 11, 2017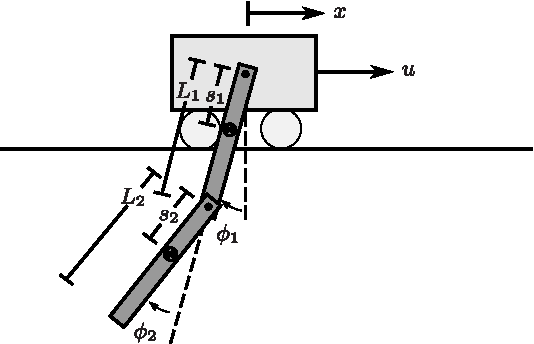


Estimation of model parameters in a dynamic system can be significantly improved with the choice of experimental trajectory. For general, nonlinear dynamic systems, finding globally "best" trajectories is typically not feasible; however, given an initial estimate of the model parameters and an initial trajectory, we present a continuous-time optimization method that produces a locally optimal trajectory for parameter estimation in the presence of measurement noise. The optimization algorithm is formulated to find system trajectories that improve a norm on the Fisher information matrix. A double-pendulum cart apparatus is used to numerically and experimentally validate this technique. In simulation, the optimized trajectory increases the minimum eigenvalue of the Fisher information matrix by three orders of magnitude compared to the initial trajectory. Experimental results show that this optimized trajectory translates to an order of magnitude improvement in the parameter estimate error in practice.
* 12 pages
Real-time Dynamic-Mode Scheduling Using Single-Integration Hybrid Optimization for Linear Time-Varying Systems
Aug 31, 2017



This paper considers the problem of real-time mode scheduling in linear time-varying switched systems subject to a quadratic cost functional. The execution time of hybrid control algorithms is often prohibitive for real-time applications and typically may only be reduced at the expense of approximation accuracy. We address this trade-off by taking advantage of system linearity to formulate a projection-based approach so that no simulation is required during open-loop optimization. A numerical example shows how the proposed open-loop algorithm outperforms methods employing common numerical integration techniques. Additionally, we follow a receding-horizon scheme to apply real-time closed-loop hybrid control to a customized experimental setup, using the Robot Operating System (ROS). In particular, we demonstrate---both in Monte-Carlo simulation and in experiment---that optimal hybrid control efficiently regulates a cart and suspended mass system in real time.