 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Task Execution using Active Parameter Identification with the Baxter Research Robot
Paper and Code
Sep 11, 2017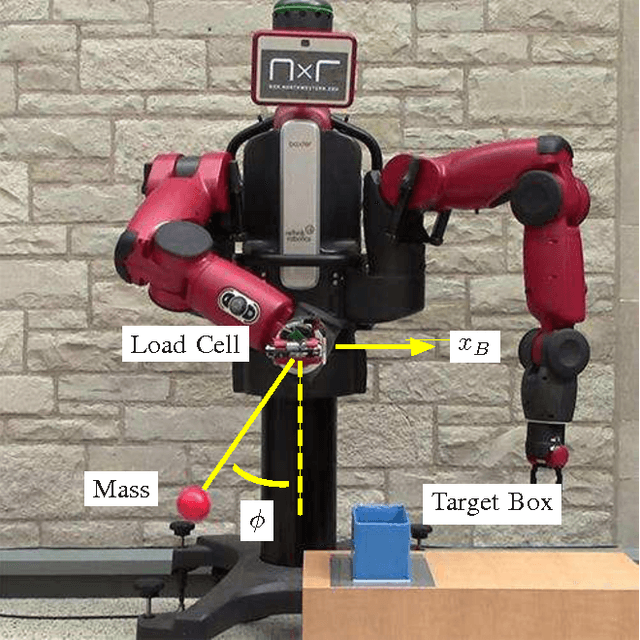
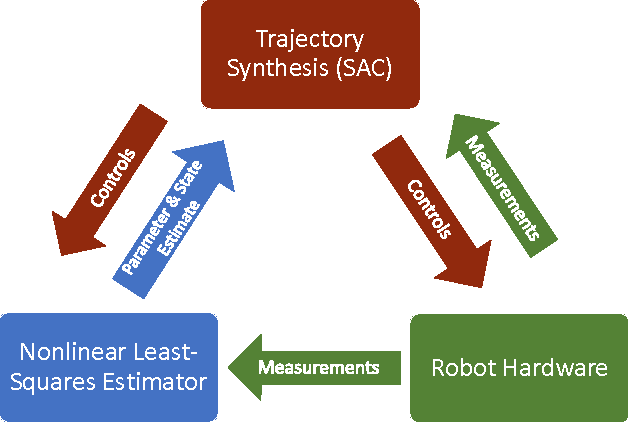
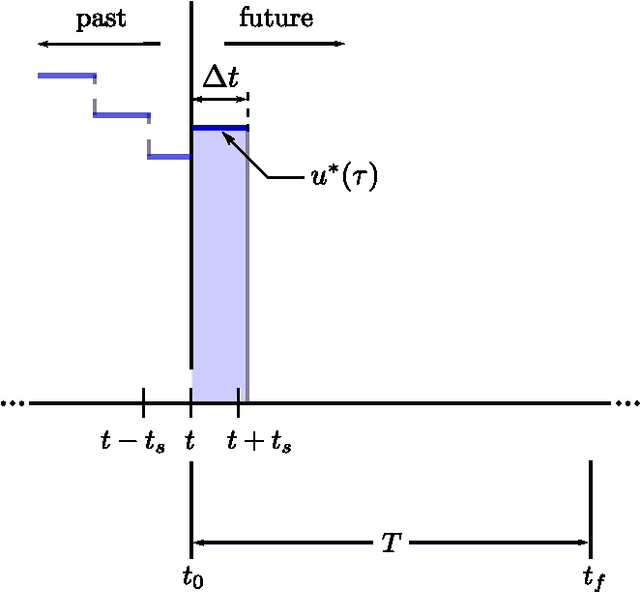
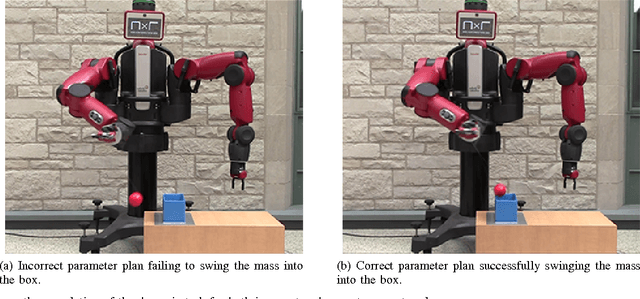
This paper presents experimental results from real-time parameter estimation of a system model and subsequent trajectory optimization for a dynamic task using the Baxter Research Robot from Rethink Robotics. An active estimator maximizing Fisher information is used in real-time with a closed-loop, non-linear control technique known as Sequential Action Control. Baxter is tasked with estimating the length of a string connected to a load suspended from the gripper with a load cell providing the single source of feedback to the estimator. Following the active estimation, a trajectory is generated using the trep software package that controls Baxter to dynamically swing a suspended load into a box. Several trials are presented with varying initial estimates showing that estimation is required to obtain adequate open-loop trajectories to complete the prescribed task. The result of one trial with and without the active estimation is also shown in the accompanying video.