 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstructing an Optimal Behavior Basis for the Option Keyboard
May 01, 2025Multi-task reinforcement learning aims to quickly identify solutions for new tasks with minimal or no additional interaction with the environment. Generalized Policy Improvement (GPI) addresses this by combining a set of base policies to produce a new one that is at least as good -- though not necessarily optimal -- as any individual base policy. Optimality can be ensured, particularly in the linear-reward case, via techniques that compute a Convex Coverage Set (CCS). However, these are computationally expensive and do not scale to complex domains. The Option Keyboard (OK) improves upon GPI by producing policies that are at least as good -- and often better. It achieves this through a learned meta-policy that dynamically combines base policies. However, its performance critically depends on the choice of base policies. This raises a key question: is there an optimal set of base policies -- an optimal behavior basis -- that enables zero-shot identification of optimal solutions for any linear tasks? We solve this open problem by introducing a novel method that efficiently constructs such an optimal behavior basis. We show that it significantly reduces the number of base policies needed to ensure optimality in new tasks. We also prove that it is strictly more expressive than a CCS, enabling particular classes of non-linear tasks to be solved optimally. We empirically evaluate our technique in challenging domains and show that it outperforms state-of-the-art approaches, increasingly so as task complexity increases.
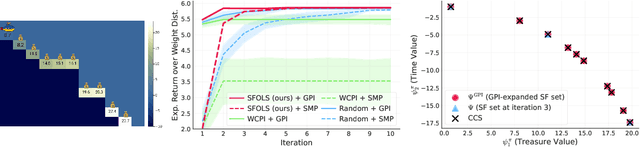
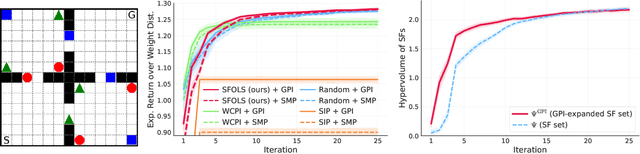
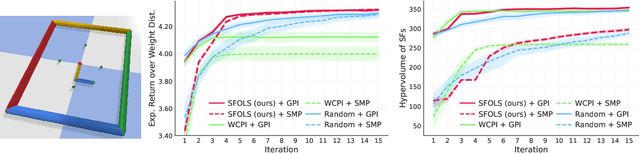
Sample-Efficient Multi-Objective Learning via Generalized Policy Improvement Prioritization
Jan 18, 2023



Multi-objective reinforcement learning (MORL) algorithms tackle sequential decision problems where agents may have different preferences over (possibly conflicting) reward functions. Such algorithms often learn a set of policies (each optimized for a particular agent preference) that can later be used to solve problems with novel preferences. We introduce a novel algorithm that uses Generalized Policy Improvement (GPI) to define principled, formally-derived prioritization schemes that improve sample-efficient learning. They implement active-learning strategies by which the agent can (i) identify the most promising preferences/objectives to train on at each moment, to more rapidly solve a given MORL problem; and (ii) identify which previous experiences are most relevant when learning a policy for a particular agent preference, via a novel Dyna-style MORL method. We prove our algorithm is guaranteed to always converge to an optimal solution in a finite number of steps, or an $\epsilon$-optimal solution (for a bounded $\epsilon$) if the agent is limited and can only identify possibly sub-optimal policies. We also prove that our method monotonically improves the quality of its partial solutions while learning. Finally, we introduce a bound that characterizes the maximum utility loss (with respect to the optimal solution) incurred by the partial solutions computed by our method throughout learning. We empirically show that our method outperforms state-of-the-art MORL algorithms in challenging multi-objective tasks, both with discrete and continuous state spaces.
Optimistic Linear Support and Successor Features as a Basis for Optimal Policy Transfer
Jun 22, 2022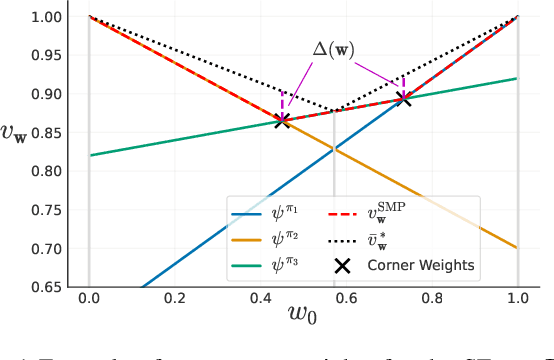
In many real-world applications, reinforcement learning (RL) agents might have to solve multiple tasks, each one typically modeled via a reward function. If reward functions are expressed linearly, and the agent has previously learned a set of policies for different tasks, successor features (SFs) can be exploited to combine such policies and identify reasonable solutions for new problems. However, the identified solutions are not guaranteed to be optimal. We introduce a novel algorithm that addresses this limitation. It allows RL agents to combine existing policies and directly identify optimal policies for arbitrary new problems, without requiring any further interactions with the environment. We first show (under mild assumptions) that the transfer learning problem tackled by SFs is equivalent to the problem of learning to optimize multiple objectives in RL. We then introduce an SF-based extension of the Optimistic Linear Support algorithm to learn a set of policies whose SFs form a convex coverage set. We prove that policies in this set can be combined via generalized policy improvement to construct optimal behaviors for any new linearly-expressible tasks, without requiring any additional training samples. We empirically show that our method outperforms state-of-the-art competing algorithms both in discrete and continuous domains under value function approximation.
Improving Urban Mobility: using artificial intelligence and new technologies to connect supply and demand
Mar 18, 2022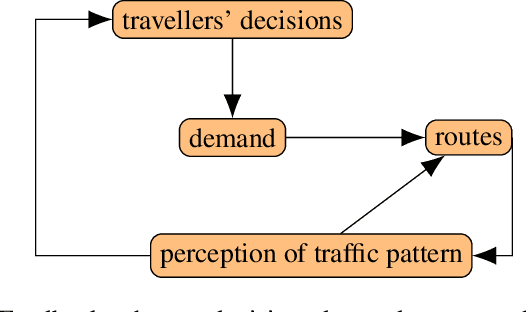
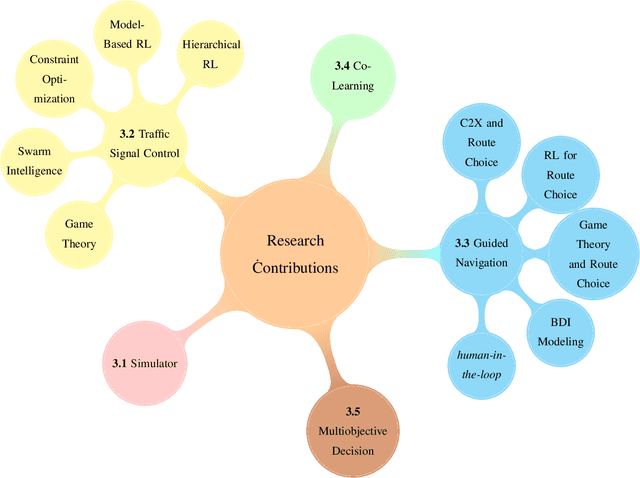
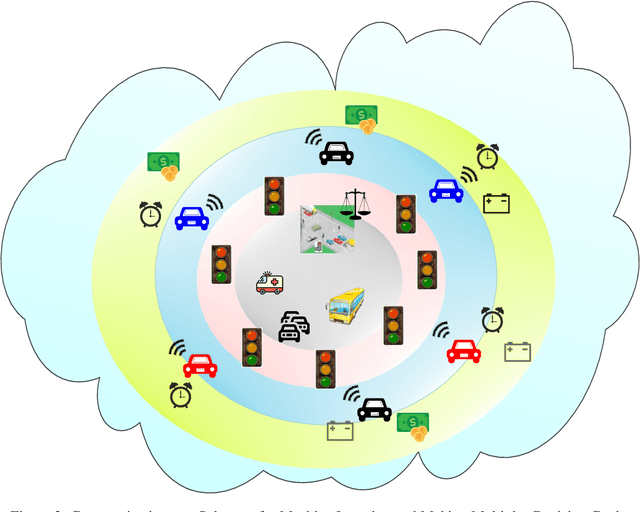
As the demand for mobility in our society seems to increase, the various issues centered on urban mobility are among those that worry most city inhabitants in this planet. For instance, how to go from A to B in an efficient (but also less stressful) way? These questions and concerns have not changed even during the covid-19 pandemic; on the contrary, as the current stand, people who are avoiding public transportation are only contributing to an increase in the vehicular traffic. The are of intelligent transportation systems (ITS) aims at investigating how to employ information and communication technologies to problems related to transportation. This may mean monitoring and managing the infrastructure (e.g., traffic roads, traffic signals, etc.). However, currently, ITS is also targeting the management of demand. In this panorama, artificial intelligence plays an important role, especially with the advances in machine learning that translates in the use of computational vision, connected and autonomous vehicles, agent-based simulation, among others. In the present work, a survey of several works developed by our group are discussed in a holistic perspective, i.e., they cover not only the supply side (as commonly found in ITS works), but also the demand side, and, in an novel perspective, the integration of both.
Minimum-Delay Adaptation in Non-Stationary Reinforcement Learning via Online High-Confidence Change-Point Detection
May 20, 2021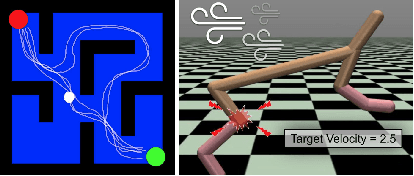
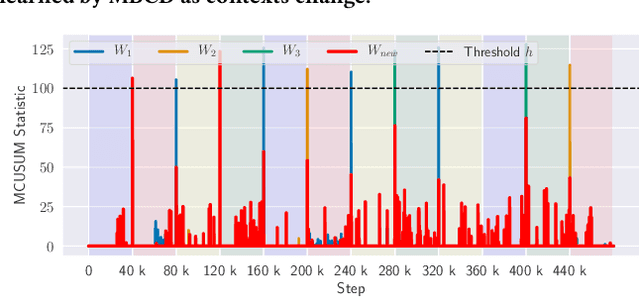
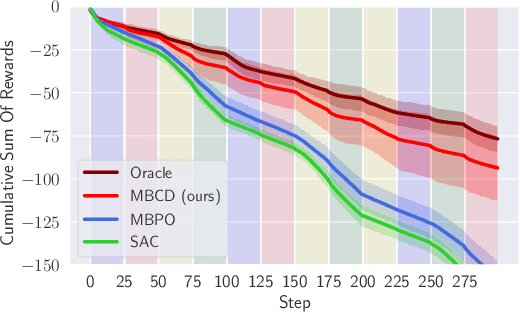
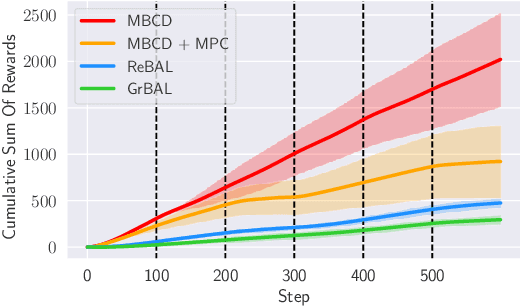
Non-stationary environments are challenging for reinforcement learning algorithms. If the state transition and/or reward functions change based on latent factors, the agent is effectively tasked with optimizing a behavior that maximizes performance over a possibly infinite random sequence of Markov Decision Processes (MDPs), each of which drawn from some unknown distribution. We call each such MDP a context. Most related works make strong assumptions such as knowledge about the distribution over contexts, the existence of pre-training phases, or a priori knowledge about the number, sequence, or boundaries between contexts. We introduce an algorithm that efficiently learns policies in non-stationary environments. It analyzes a possibly infinite stream of data and computes, in real-time, high-confidence change-point detection statistics that reflect whether novel, specialized policies need to be created and deployed to tackle novel contexts, or whether previously-optimized ones might be reused. We show that (i) this algorithm minimizes the delay until unforeseen changes to a context are detected, thereby allowing for rapid responses; and (ii) it bounds the rate of false alarm, which is important in order to minimize regret. Our method constructs a mixture model composed of a (possibly infinite) ensemble of probabilistic dynamics predictors that model the different modes of the distribution over underlying latent MDPs. We evaluate our algorithm on high-dimensional continuous reinforcement learning problems and show that it outperforms state-of-the-art (model-free and model-based) RL algorithms, as well as state-of-the-art meta-learning methods specially designed to deal with non-stationarity.
* Published at Proc. of the 20th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2021)
Quantitatively Assessing the Benefits of Model-driven Development in Agent-based Modeling and Simulation
Jun 15, 2020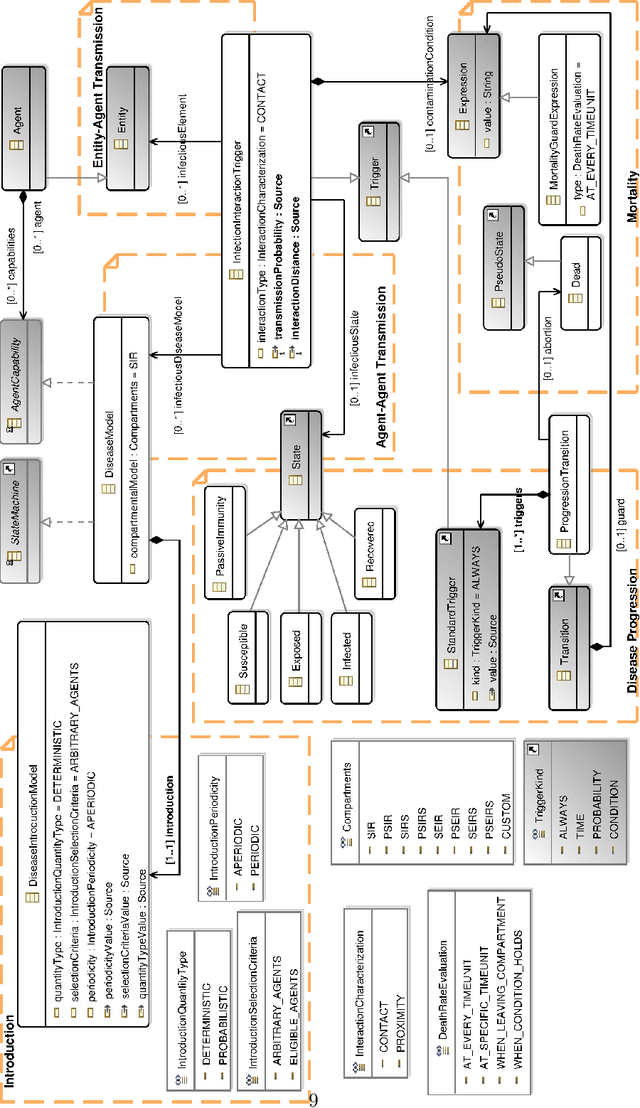
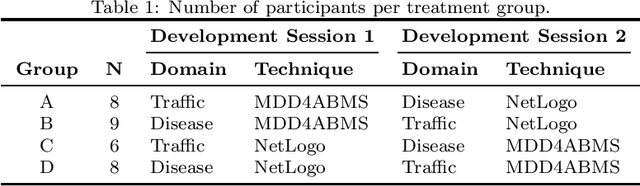
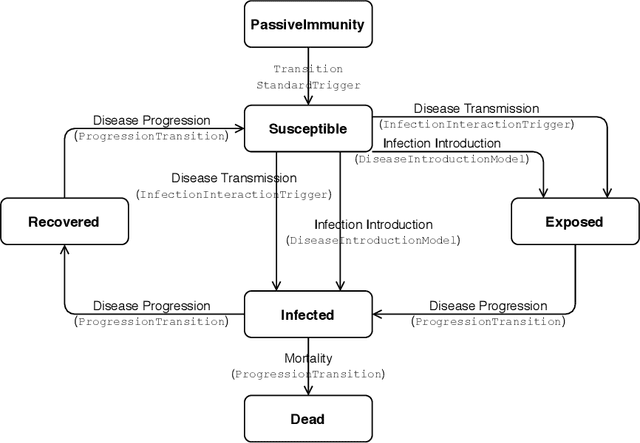
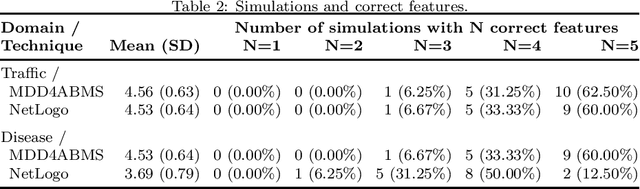
The agent-based modeling and simulation (ABMS) paradigm has been used to analyze, reproduce, and predict phenomena related to many application areas. Although there are many agent-based platforms that support simulation development, they rely on programming languages that require extensive programming knowledge. Model-driven development (MDD) has been explored to facilitate simulation modeling, by means of high-level modeling languages that provide reusable building blocks that hide computational complexity, and code generation. However, there is still limited knowledge of how MDD approaches to ABMS contribute to increasing development productivity and quality. We thus in this paper present an empirical study that quantitatively compares the use of MDD and ABMS platforms mainly in terms of effort and developer mistakes. Our evaluation was performed using MDD4ABMS-an MDD approach with a core and extensions to two application areas, one of which developed for this study-and NetLogo, a widely used platform. The obtained results show that MDD4ABMS requires less effort to develop simulations with similar (sometimes better) design quality than NetLogo, giving evidence of the benefits that MDD can provide to ABMS.
Quantifying the Impact of Non-Stationarity in Reinforcement Learning-Based Traffic Signal Control
Apr 09, 2020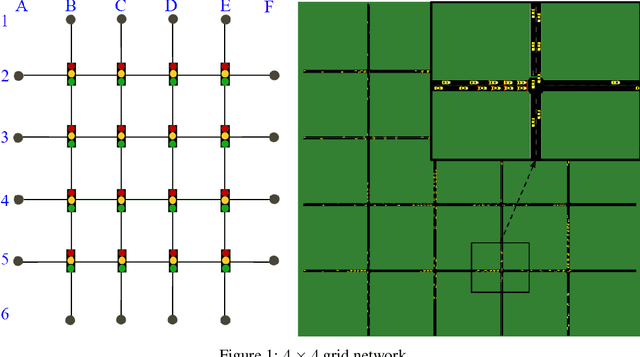
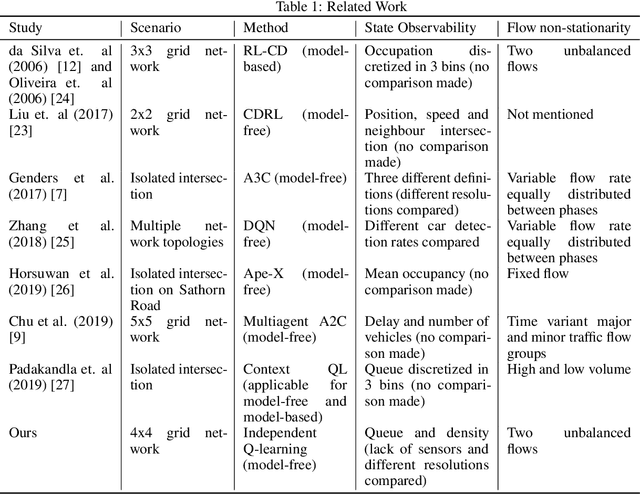
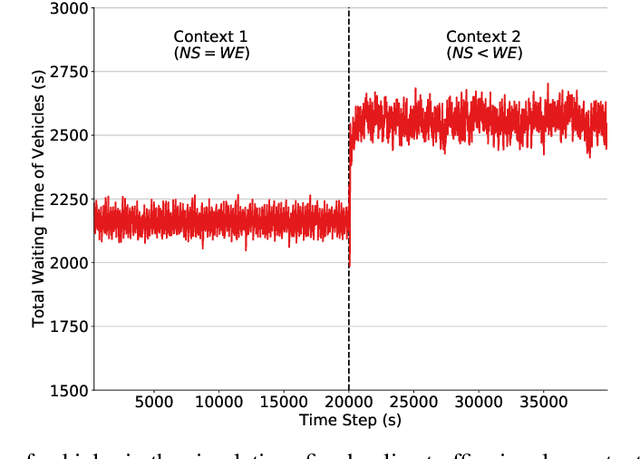
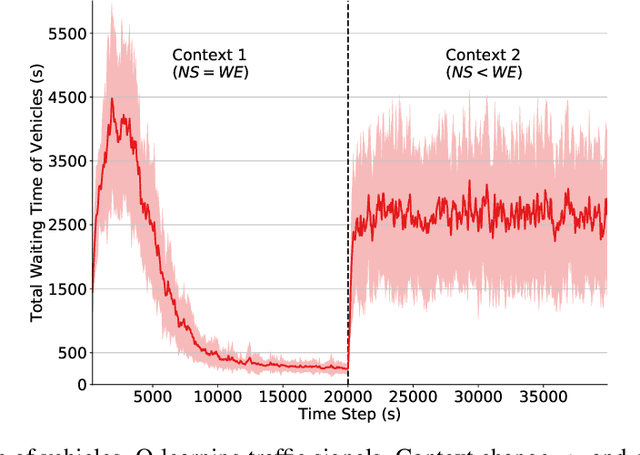
In reinforcement learning (RL), dealing with non-stationarity is a challenging issue. However, some domains such as traffic optimization are inherently non-stationary. Causes for and effects of this are manifold. In particular, when dealing with traffic signal controls, addressing non-stationarity is key since traffic conditions change over time and as a function of traffic control decisions taken in other parts of a network. In this paper we analyze the effects that different sources of non-stationarity have in a network of traffic signals, in which each signal is modeled as a learning agent. More precisely, we study both the effects of changing the \textit{context} in which an agent learns (e.g., a change in flow rates experienced by it), as well as the effects of reducing agent observability of the true environment state. Partial observability may cause distinct states (in which distinct actions are optimal) to be seen as the same by the traffic signal agents. This, in turn, may lead to sub-optimal performance. We show that the lack of suitable sensors to provide a representative observation of the real state seems to affect the performance more drastically than the changes to the underlying traffic patterns.
Temporal Network Analysis of Literary Texts
Feb 22, 2016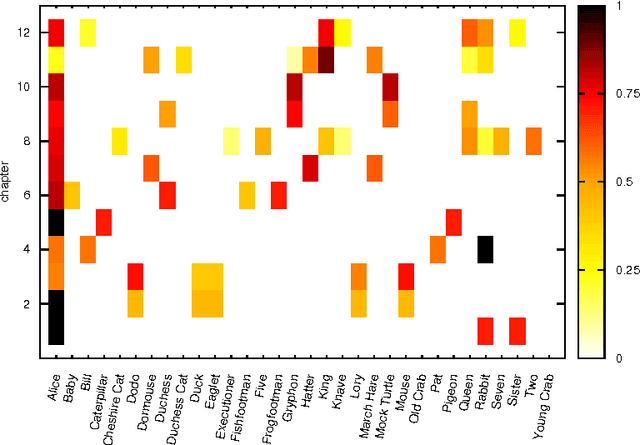
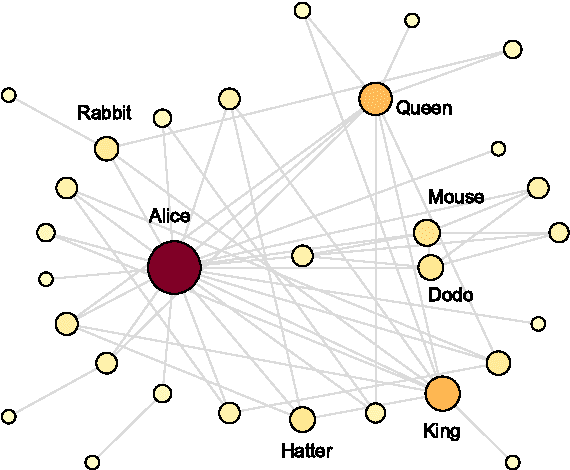
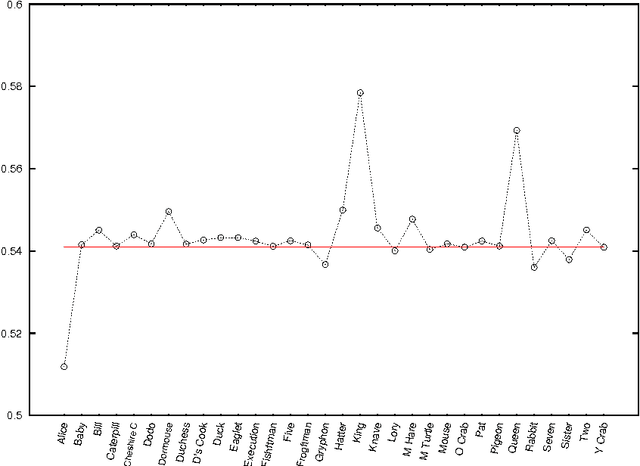
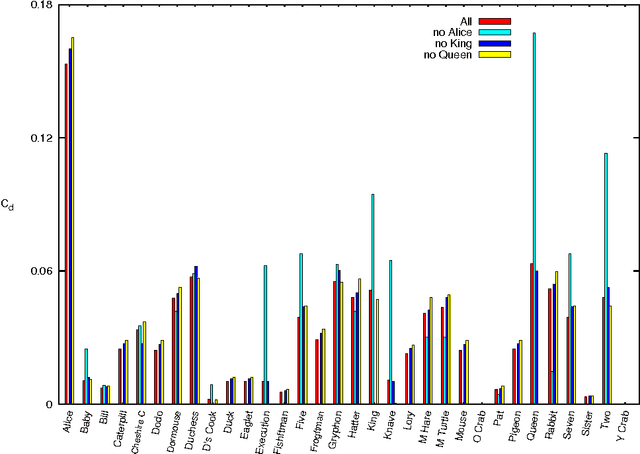
We study temporal networks of characters in literature focusing on "Alice's Adventures in Wonderland" (1865) by Lewis Carroll and the anonymous "La Chanson de Roland" (around 1100). The former, one of the most influential pieces of nonsense literature ever written, describes the adventures of Alice in a fantasy world with logic plays interspersed along the narrative. The latter, a song of heroic deeds, depicts the Battle of Roncevaux in 778 A.D. during Charlemagne's campaign on the Iberian Peninsula. We apply methods recently developed by Taylor and coworkers \cite{Taylor+2015} to find time-averaged eigenvector centralities, Freeman indices and vitalities of characters. We show that temporal networks are more appropriate than static ones for studying stories, as they capture features that the time-independent approaches fail to yield.