 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying the Impact of Non-Stationarity in Reinforcement Learning-Based Traffic Signal Control
Paper and Code
Apr 09, 2020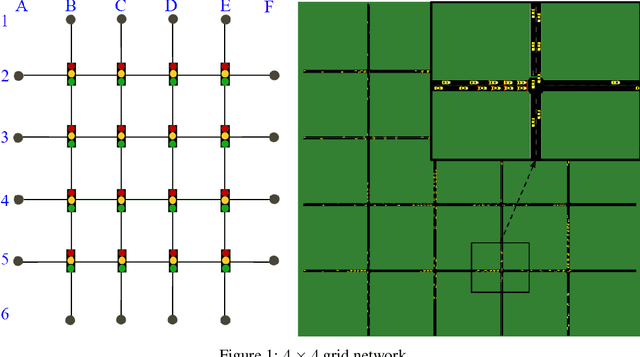
In reinforcement learning (RL), dealing with non-stationarity is a challenging issue. However, some domains such as traffic optimization are inherently non-stationary. Causes for and effects of this are manifold. In particular, when dealing with traffic signal controls, addressing non-stationarity is key since traffic conditions change over time and as a function of traffic control decisions taken in other parts of a network. In this paper we analyze the effects that different sources of non-stationarity have in a network of traffic signals, in which each signal is modeled as a learning agent. More precisely, we study both the effects of changing the \textit{context} in which an agent learns (e.g., a change in flow rates experienced by it), as well as the effects of reducing agent observability of the true environment state. Partial observability may cause distinct states (in which distinct actions are optimal) to be seen as the same by the traffic signal agents. This, in turn, may lead to sub-optimal performance. We show that the lack of suitable sensors to provide a representative observation of the real state seems to affect the performance more drastically than the changes to the underlying traffic patterns.