 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBurstGP: Enhancing Raw Burst Image Super Resolution with Generative Priors
Apr 26, 2026Burst image super resolution (BISR) aims to construct a single high-resolution (HR) image by aggregating information from multiple low-resolution (LR) frames, relying on temporal redundancy and spatial coherence across the burst. While conventional methods achieve impressive results, they often struggle with complex textures and oversmoothing. Diffusion models, particularly those pretrained on high-quality data, have shown remarkable capability in generating realistic details for image and video super-resolution. However, their potential remains largely under-explored in BISR, where existing approaches typically rely on task-specific diffusion models trained from scratch and operate on single-frame reconstructions. In this work, we propose BurstGP, a novel diffusion-based solution for BISR, which leverages generative priors of recent foundation models to overcome these issues. In particular, we build a multiframe-aware diffusion model on top of a conventional BISR approach, which boosts image quality with minimal loss to fidelity. Further, we introduce (i) a novel degradation-aware conditioning mechanism, which controls synthesis of fine details based on the estimated degradation in the input, and (ii) a robust sRGB-to-lRGB inverter, enabling us to utilize generative multiframe (video) sRGB priors, while operating with raw input and lRGB output images. Empirically, we demonstrate that BurstGP outperforms the existing state of the art, both quantitatively (especially with respect to perceptual metrics, including MUSIQ and LPIPS) and qualitatively. In particular, our proposed method excels at recovering richer textures and finer structural details, highlighting the potential of video priors for BISR over traditional methods.
Face2Scene: Using Facial Degradation as an Oracle for Diffusion-Based Scene Restoration
Mar 17, 2026Recent advances in image restoration have enabled high-fidelity recovery of faces from degraded inputs using reference-based face restoration models (Ref-FR). However, such methods focus solely on facial regions, neglecting degradation across the full scene, including body and background, which limits practical usability. Meanwhile, full-scene restorers often ignore degradation cues entirely, leading to underdetermined predictions and visual artifacts. In this work, we propose Face2Scene, a two-stage restoration framework that leverages the face as a perceptual oracle to estimate degradation and guide the restoration of the entire image. Given a degraded image and one or more identity references, we first apply a Ref-FR model to reconstruct high-quality facial details. From the restored-degraded face pair, we extract a face-derived degradation code that captures degradation attributes (e.g., noise, blur, compression), which is then transformed into multi-scale degradation-aware tokens. These tokens condition a diffusion model to restore the full scene in a single step, including the body and background. Extensive experiments demonstrate the superior effectiveness of the proposed method compared to state-of-the-art methods.
Dual-Camera Joint Deblurring-Denoising
Sep 16, 2023Recent image enhancement methods have shown the advantages of using a pair of long and short-exposure images for low-light photography. These image modalities offer complementary strengths and weaknesses. The former yields an image that is clean but blurry due to camera or object motion, whereas the latter is sharp but noisy due to low photon count. Motivated by the fact that modern smartphones come equipped with multiple rear-facing camera sensors, we propose a novel dual-camera method for obtaining a high-quality image. Our method uses a synchronized burst of short exposure images captured by one camera and a long exposure image simultaneously captured by another. Having a synchronized short exposure burst alongside the long exposure image enables us to (i) obtain better denoising by using a burst instead of a single image, (ii) recover motion from the burst and use it for motion-aware deblurring of the long exposure image, and (iii) fuse the two results to further enhance quality. Our method is able to achieve state-of-the-art results on synthetic dual-camera images from the GoPro dataset with five times fewer training parameters compared to the next best method. We also show that our method qualitatively outperforms competing approaches on real synchronized dual-camera captures.
Gated Stereo: Joint Depth Estimation from Gated and Wide-Baseline Active Stereo Cues
May 22, 2023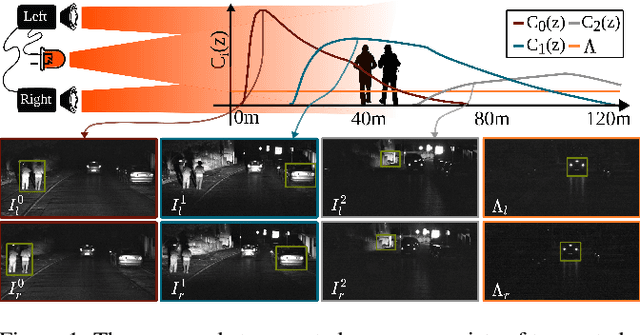
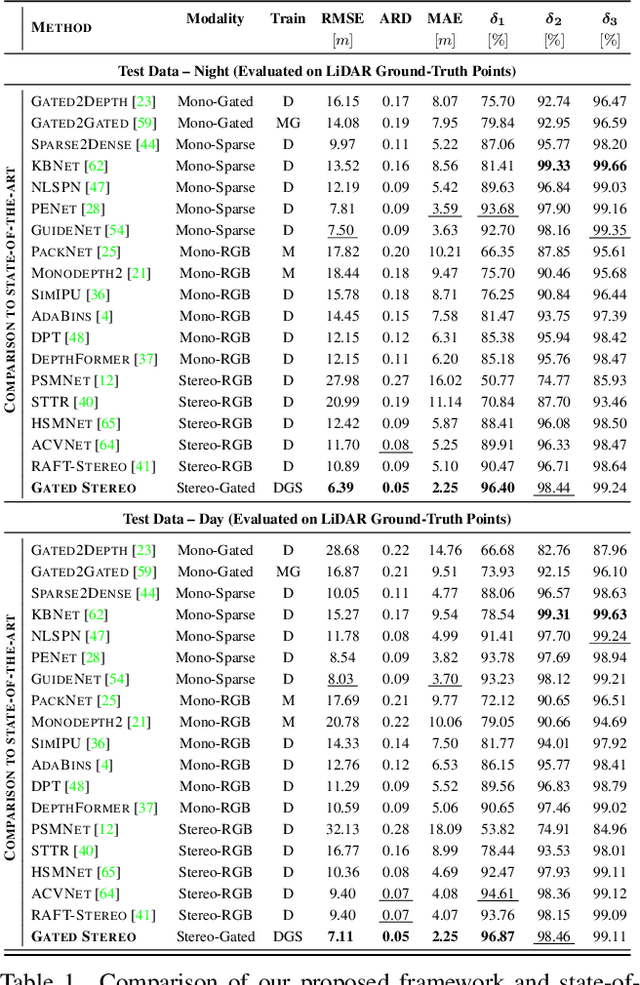
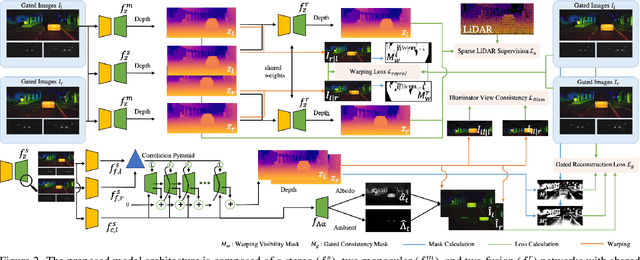
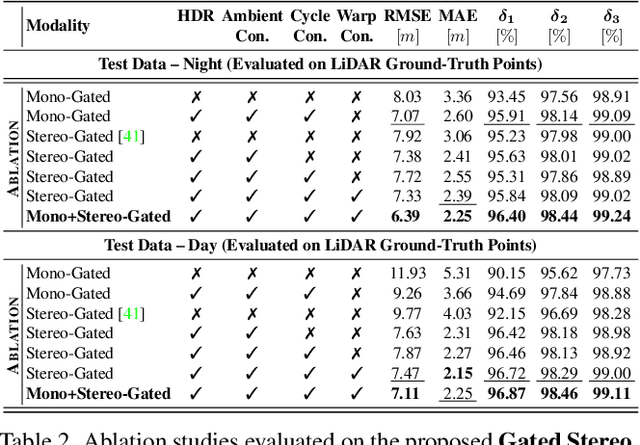
We propose Gated Stereo, a high-resolution and long-range depth estimation technique that operates on active gated stereo images. Using active and high dynamic range passive captures, Gated Stereo exploits multi-view cues alongside time-of-flight intensity cues from active gating. To this end, we propose a depth estimation method with a monocular and stereo depth prediction branch which are combined in a final fusion stage. Each block is supervised through a combination of supervised and gated self-supervision losses. To facilitate training and validation, we acquire a long-range synchronized gated stereo dataset for automotive scenarios. We find that the method achieves an improvement of more than 50 % MAE compared to the next best RGB stereo method, and 74 % MAE to existing monocular gated methods for distances up to 160 m. Our code,models and datasets are available here.
Gated2Gated: Self-Supervised Depth Estimation from Gated Images
Dec 04, 2021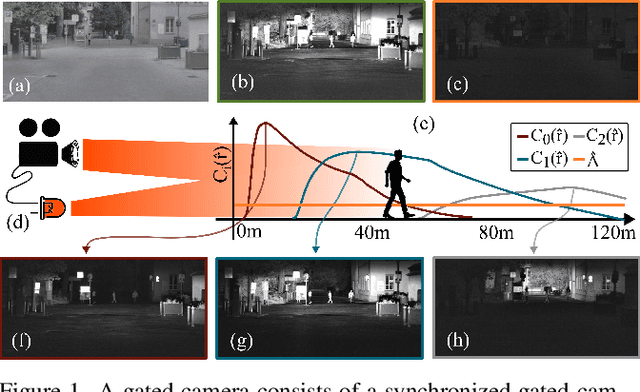
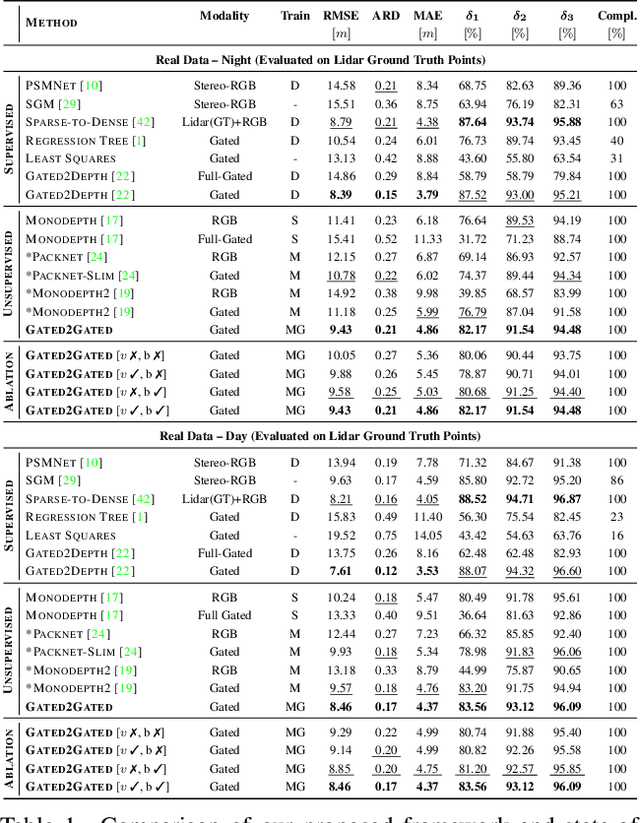
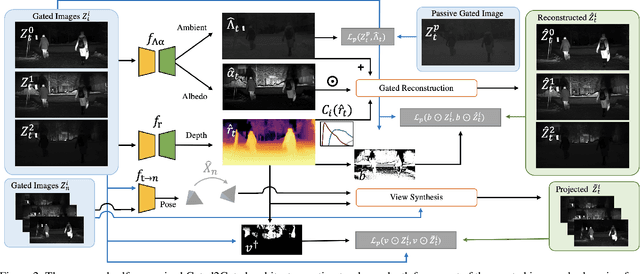
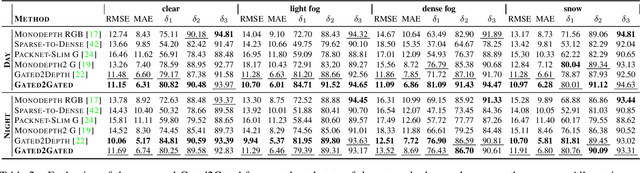
Gated cameras hold promise as an alternative to scanning LiDAR sensors with high-resolution 3D depth that is robust to back-scatter in fog, snow, and rain. Instead of sequentially scanning a scene and directly recording depth via the photon time-of-flight, as in pulsed LiDAR sensors, gated imagers encode depth in the relative intensity of a handful of gated slices, captured at megapixel resolution. Although existing methods have shown that it is possible to decode high-resolution depth from such measurements, these methods require synchronized and calibrated LiDAR to supervise the gated depth decoder -- prohibiting fast adoption across geographies, training on large unpaired datasets, and exploring alternative applications outside of automotive use cases. In this work, we fill this gap and propose an entirely self-supervised depth estimation method that uses gated intensity profiles and temporal consistency as a training signal. The proposed model is trained end-to-end from gated video sequences, does not require LiDAR or RGB data, and learns to estimate absolute depth values. We take gated slices as input and disentangle the estimation of the scene albedo, depth, and ambient light, which are then used to learn to reconstruct the input slices through a cyclic loss. We rely on temporal consistency between a given frame and neighboring gated slices to estimate depth in regions with shadows and reflections. We experimentally validate that the proposed approach outperforms existing supervised and self-supervised depth estimation methods based on monocular RGB and stereo images, as well as supervised methods based on gated images.