 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROSIA: Rotation-Search-Based Star Identification Algorithm
Oct 02, 2022
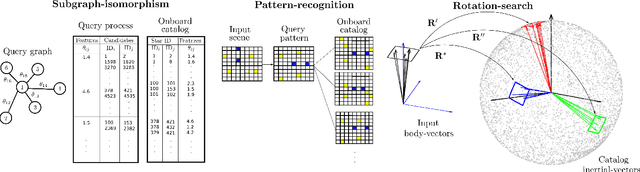

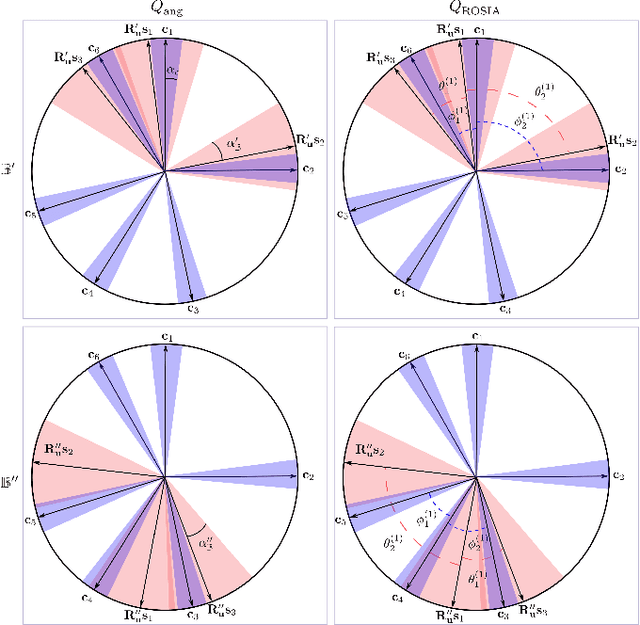
Solving the star identification (Star-ID) problem with a rotation-search-based approach eliminates the conventional heuristics in the established paradigms, i.e., the subgraph-isomorphic-based and pattern-recognition-based methods. However, it is not trivial to execute such an approach efficiently. Here, we present ROSIA, which seeks the optimal rotation alignment that maximally matches the input and catalog stars in their respective coordinates. ROSIA searches the rotation space systematically with the Branch-and-Bound (BnB) method. Crucially affecting the runtime feasibility of ROSIA is the upper bound function that prioritizes the search space. In this paper, we make a theoretical contribution by proposing a tight (provable) upper bound function that allows a 400x speed up compared to an existing formulation. Coupling the bounding function with an efficient evaluation scheme that leverages stereographic projection and the R-tree data structure, ROSIA achieves real-time operational speed with state-of-the-art performances under different sources of noise.
Visual SLAM: Why Bundle Adjust?
Feb 11, 2019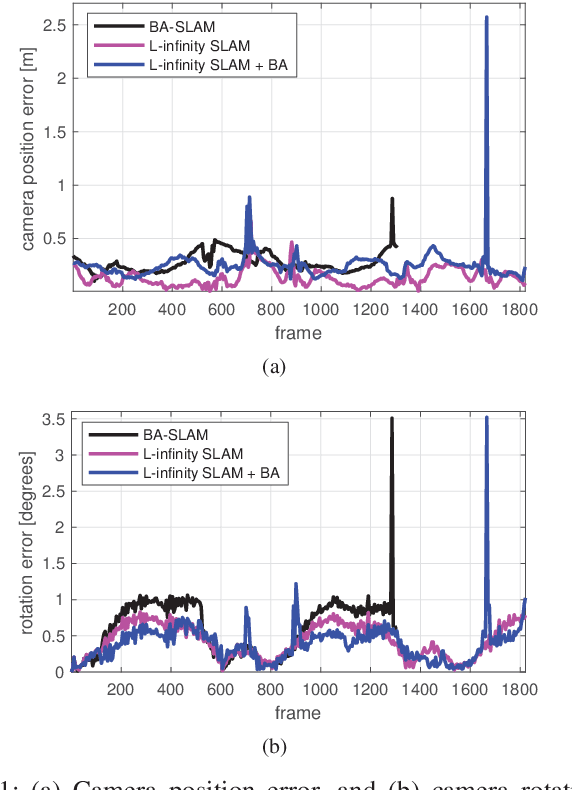
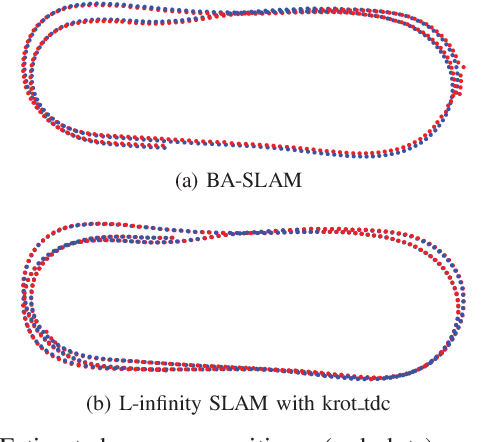
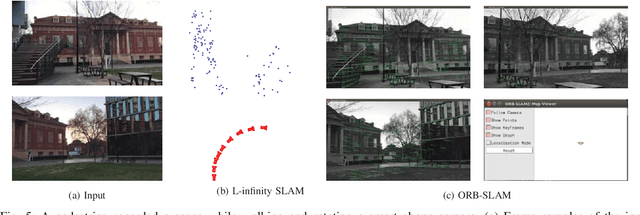
Bundle adjustment plays a vital role in feature-based monocular SLAM. In many modern SLAM pipelines, bundle adjustment is performed to estimate the 6DOF camera trajectory and 3D map (3D point cloud) from the input feature tracks. However, two fundamental weaknesses plague SLAM systems based on bundle adjustment. First, the need to carefully initialise bundle adjustment means that all variables, in particular the map, must be estimated as accurately as possible and maintained over time, which makes the overall algorithm cumbersome. Second, since estimating the 3D structure (which requires sufficient baseline) is inherent in bundle adjustment, the SLAM algorithm will encounter difficulties during periods of slow motion or pure rotational motion. We propose a different SLAM optimisation core: instead of bundle adjustment, we conduct rotation averaging to incrementally optimise only camera orientations. Given the orientations, we estimate the camera positions and 3D points via a quasi-convex formulation that can be solved efficiently and globally optimally. Our approach not only obviates the need to estimate and maintain the positions and 3D map at keyframe rate (which enables simpler SLAM systems), it is also more capable of handling slow motions or pure rotational motions.
A Practical Maximum Clique Algorithm for Matching with Pairwise Constraints
Feb 05, 2019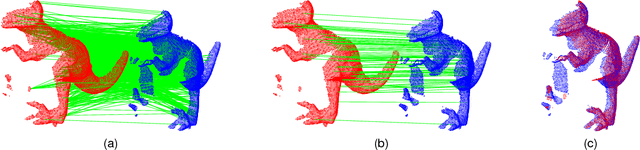
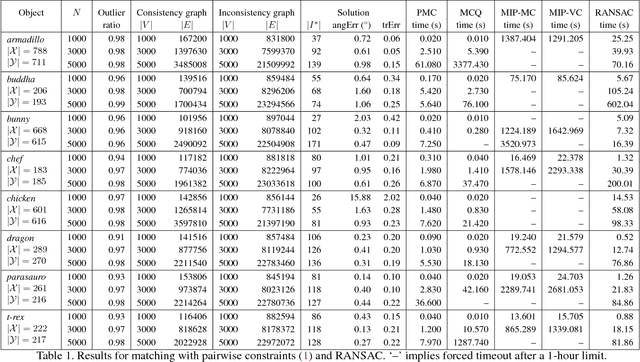
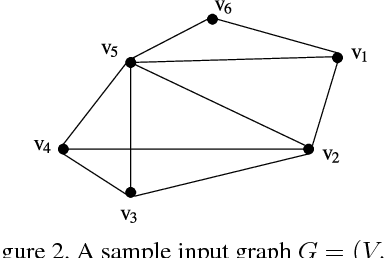
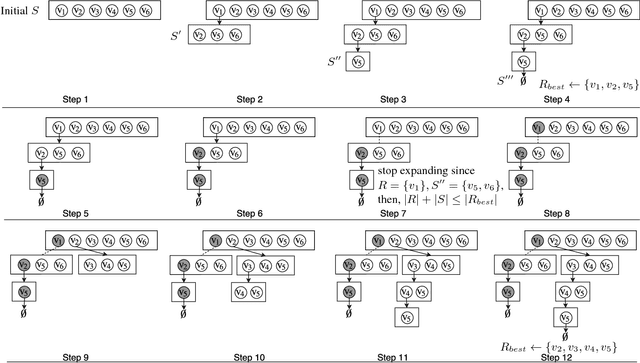
A popular paradigm for 3D point cloud registration is by extracting 3D keypoint correspondences, then estimating the registration function from the correspondences using a robust algorithm. However, many existing 3D keypoint techniques tend to produce large proportions of erroneous correspondences or outliers, which significantly increases the cost of robust estimation. An alternative approach is to directly search for the subset of correspondences that are pairwise consistent, without optimising the registration function. This gives rise to the combinatorial problem of matching with pairwise constraints. In this paper, we propose a very efficient maximum clique algorithm to solve matching with pairwise constraints. Our technique combines tree searching with efficient bounding and pruning based on graph colouring. We demonstrate that, despite the theoretical intractability, many real problem instances can be solved exactly and quickly (seconds to minutes) with our algorithm, which makes our approach an excellent alternative to standard robust techniques for 3D registration.
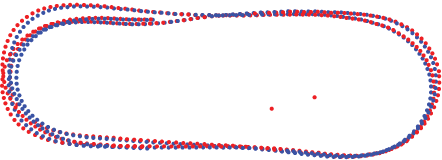
Practical optimal registration of terrestrial LiDAR scan pairs
Nov 30, 2018
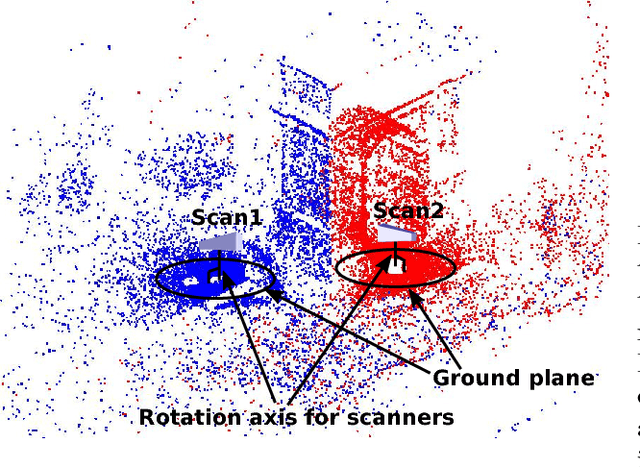
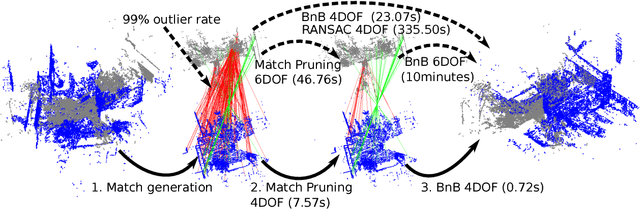
Point cloud registration is a fundamental problem in 3D scanning. In this paper, we address the frequent special case of registering terrestrial LiDAR scans (or, more generally, levelled point clouds). Many current solutions still rely on the Iterative Closest Point (ICP) method or other heuristic procedures, which require good initializations to succeed and/or provide no guarantees of success. On the other hand, exact or optimal registration algorithms can compute the best possible solution without requiring initializations; however, they are currently too slow to be practical in realistic applications. Existing optimal approaches ignore the fact that in routine use the relative rotations between scans are constrained to the azimuth, via the built-in level compensation in LiDAR scanners. We propose a novel, optimal and computationally efficient registration method for this 4DOF scenario. Our approach operates on candidate 3D keypoint correspondences, and contains two main steps: (1) a deterministic selection scheme that significantly reduces the candidate correspondence set in a way that is guaranteed to preserve the optimal solution; and (2) a fast branch-and-bound (BnB) algorithm with a novel polynomial-time subroutine for 1D rotation search, that quickly finds the optimal alignment for the reduced set. We demonstrate the practicality of our method on realistic point clouds from multiple LiDAR surveys.