 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Factor Graph Optimization for Learning Smoothers
May 20, 2021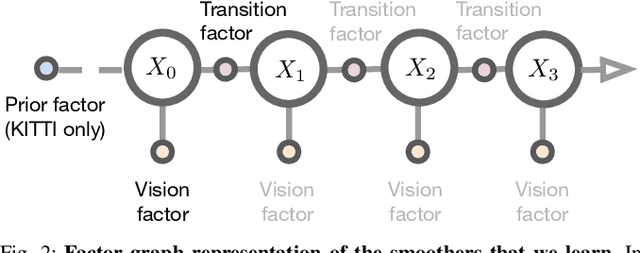
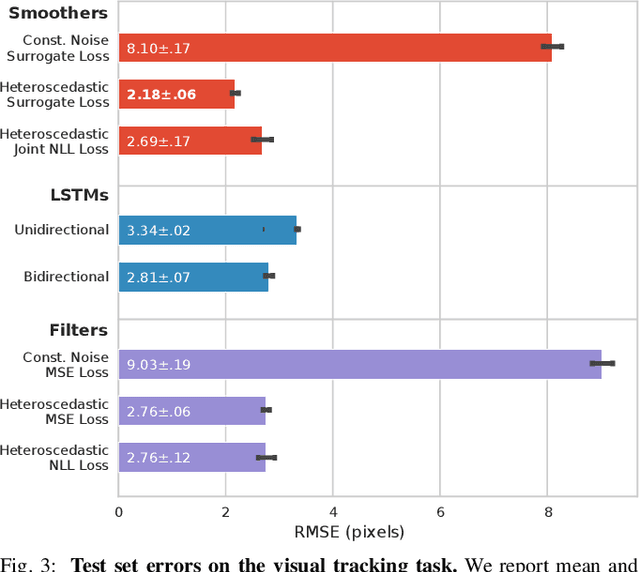
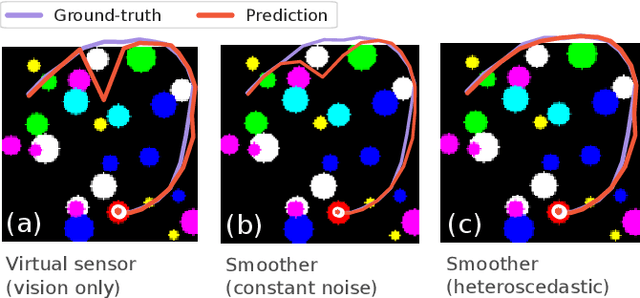
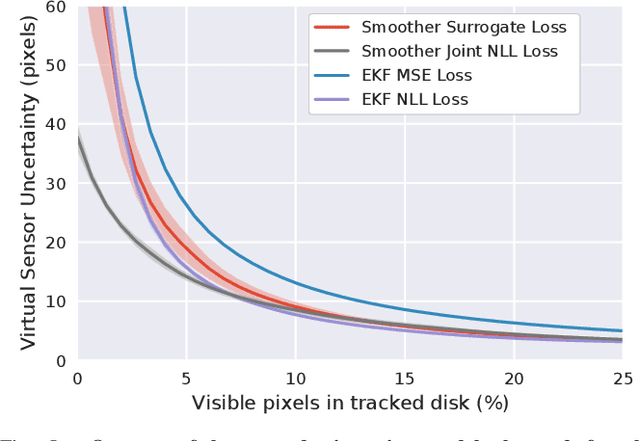
A recent line of work has shown that end-to-end optimization of Bayesian filters can be used to learn state estimators for systems whose underlying models are difficult to hand-design or tune, while retaining the core advantages of probabilistic state estimation. As an alternative approach for state estimation in these settings, we present an end-to-end approach for learning state estimators modeled as factor graph-based smoothers. By unrolling the optimizer we use for maximum a posteriori inference in these probabilistic graphical models, this method is able to learn probabilistic system models in the full context of an overall state estimator, while also taking advantage of the distinct accuracy and runtime advantages that smoothers offer over recursive filters. We study our approach using two fundamental state estimation problems, object tracking and visual odometry, where we demonstrate a significant improvement over existing baselines. Our work comes with an extensive code release, which includes the evaluated models and libraries for differentiable Lie theory and factor graph optimization: https://sites.google.com/view/diffsmoothing/
How to Train Your Differentiable Filter
Dec 28, 2020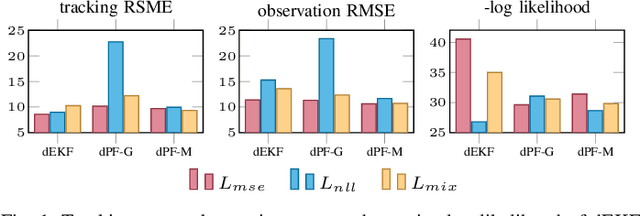
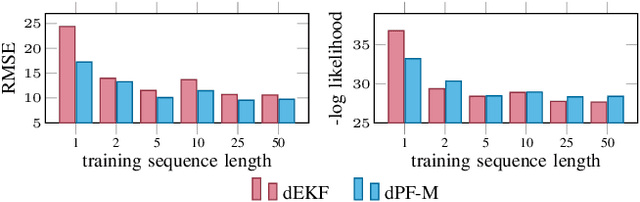
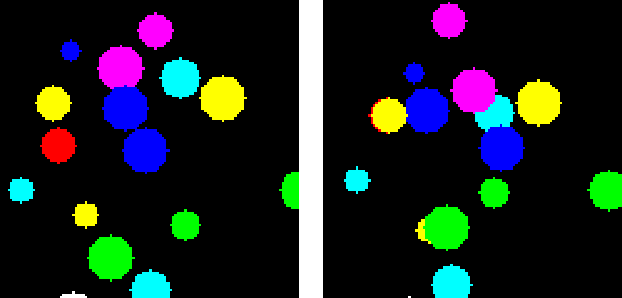
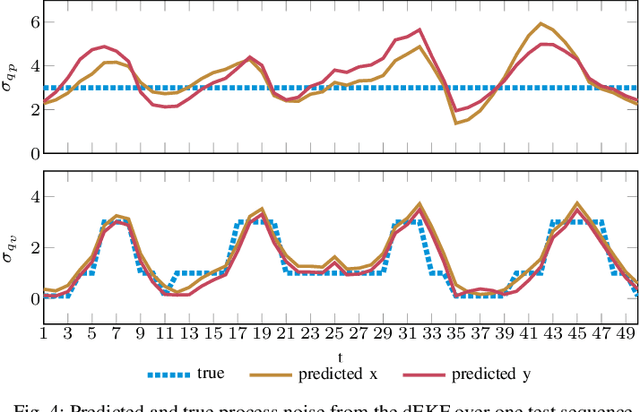
In many robotic applications, it is crucial to maintain a belief about the state of a system, which serves as input for planning and decision making and provides feedback during task execution. Bayesian Filtering algorithms address this state estimation problem, but they require models of process dynamics and sensory observations and the respective noise characteristics of these models. Recently, multiple works have demonstrated that these models can be learned by end-to-end training through differentiable versions of recursive filtering algorithms. In this work, we investigate the advantages of differentiable filters (DFs) over both unstructured learning approaches and manually-tuned filtering algorithms, and provide practical guidance to researchers interested in applying such differentiable filters. For this, we implement DFs with four different underlying filtering algorithms and compare them in extensive experiments. Specifically, we (i) evaluate different implementation choices and training approaches, (ii) investigate how well complex models of uncertainty can be learned in DFs, (iii) evaluate the effect of end-to-end training through DFs and (iv) compare the DFs among each other and to unstructured LSTM models.
Accurate Vision-based Manipulation through Contact Reasoning
Nov 08, 2019
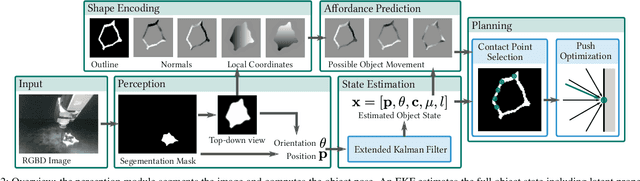
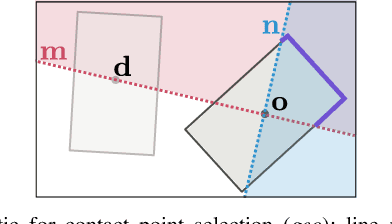
Planning contact interactions is one of the core challenges of many robotic tasks. Optimizing contact locations while taking dynamics into account is computationally costly and in only partially observed environments, executing contact-based tasks often suffers from low accuracy. We present an approach that addresses these two challenges for the problem of vision-based manipulation. First, we propose to disentangle contact from motion optimization. Thereby, we improve planning efficiency by focusing computation on promising contact locations. Second, we use a hybrid approach for perception and state estimation that combines neural networks with a physically meaningful state representation. In simulation and real-world experiments on the task of planar pushing, we show that our method is more efficient and achieves a higher manipulation accuracy than previous vision-based approaches.
Combining learned and analytical models for predicting action effects
Oct 19, 2018

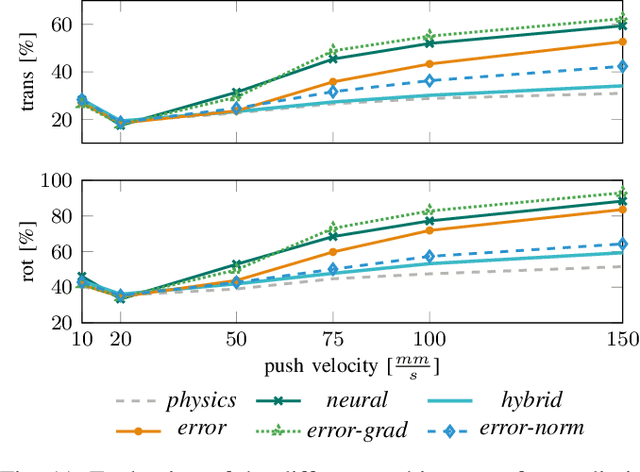
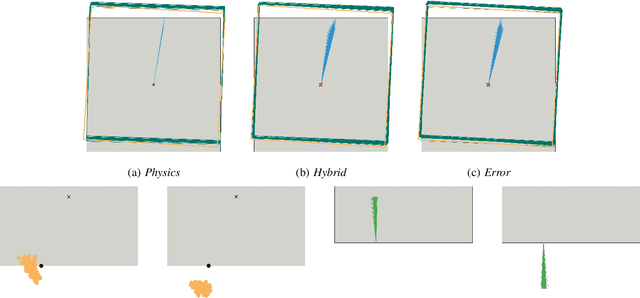
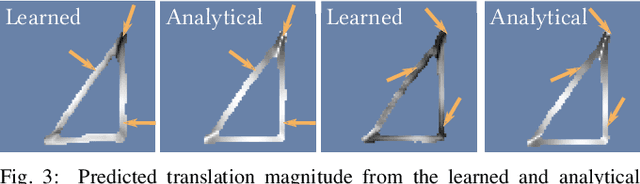
One of the most basic skills a robot should possess is predicting the effect of physical interactions with objects in the environment. This enables optimal action selection to reach a certain goal state. Traditionally, dynamics are approximated by physics-based analytical models. These models rely on specific state representations that may be hard to obtain from raw sensory data, especially if no knowledge of the object shape is assumed. More recently, we have seen learning approaches that can predict the effect of complex physical interactions directly from sensory input. It is however an open question how far these models generalize beyond their training data. In this work, we investigate the advantages and limitations of neural network based learning approaches for predicting the effects of actions based on sensory input and show how analytical and learned models can be combined to leverage the best of both worlds. As physical interaction task, we use planar pushing, for which there exists a well-known analytical model and a large real-world dataset. We propose to use a convolutional neural network to convert raw depth images or organized point clouds into a suitable representation for the analytical model and compare this approach to using neural networks for both, perception and prediction. A systematic evaluation of the proposed approach on a very large real-world dataset shows two main advantages of the hybrid architecture. Compared to a pure neural network, it significantly (i) reduces required training data and (ii) improves generalization to novel physical interaction.