 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESCORE: LLM-Driven Simulation Recovery in Control Systems Research Papers
Apr 06, 2026Reconstructing numerical simulations from control systems research papers is often hindered by underspecified parameters and ambiguous implementation details. We define the task of Paper to Simulation Recoverability, the ability of an automated system to generate executable code that faithfully reproduces a paper's results. We curate a benchmark of 500 papers from the IEEE Conference on Decision and Control (CDC) and propose RESCORE, a three component LLM agentic framework, Analyzer, Coder, and Verifier. RESCORE uses iterative execution feedback and visual comparison to improve reconstruction fidelity. Our method successfully recovers task coherent simulations for 40.7% of benchmark instances, outperforming single pass generation. Notably, the RESCORE automated pipeline achieves an estimated 10X speedup over manual human replication, drastically cutting the time and effort required to verify published control methodologies. We will release our benchmark and agents to foster community progress in automated research replication.
Safe Multi-Robotic Arm Interaction via 3D Convex Shapes
Mar 14, 2025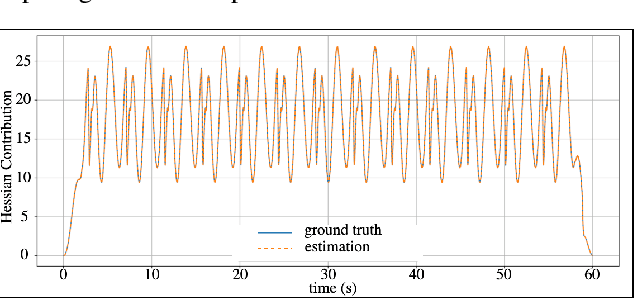
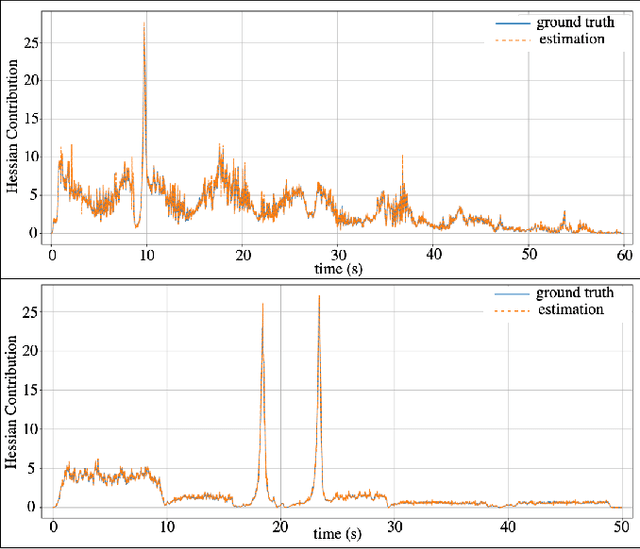
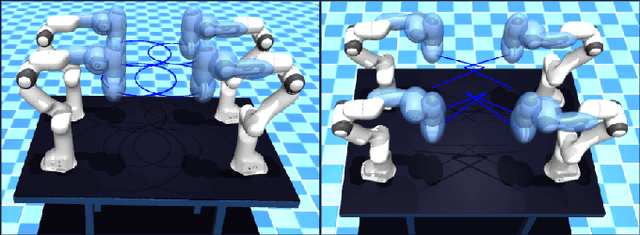
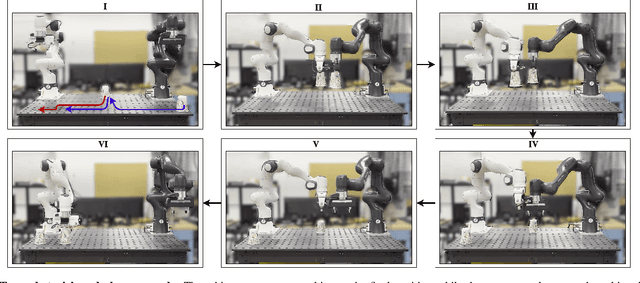
Inter-robot collisions pose a significant safety risk when multiple robotic arms operate in close proximity. We present an online collision avoidance methodology leveraging 3D convex shape-based High-Order Control Barrier Functions (HOCBFs) to address this issue. While prior works focused on using Control Barrier Functions (CBFs) for human-robotic arm and single-arm collision avoidance, we explore the problem of collision avoidance between multiple robotic arms operating in a shared space. In our methodology, we utilize the proposed HOCBFs as centralized and decentralized safety filters. These safety filters are compatible with any nominal controller and ensure safety without significantly restricting the robots' workspace. A key challenge in implementing these filters is the computational overhead caused by the large number of safety constraints and the computation of a Hessian matrix per constraint. We address this challenge by employing numerical differentiation methods to approximate computationally intensive terms. The effectiveness of our method is demonstrated through extensive simulation studies and real-world experiments with Franka Research 3 robotic arms.
OrionNav: Online Planning for Robot Autonomy with Context-Aware LLM and Open-Vocabulary Semantic Scene Graphs
Oct 08, 2024



Enabling robots to autonomously navigate unknown, complex, dynamic environments and perform diverse tasks remains a fundamental challenge in developing robust autonomous physical agents. They must effectively perceive their surroundings while leveraging world knowledge for decision-making. While recent approaches utilize vision-language and large language models for scene understanding and planning, they often rely on offline processing, external computing, or restrictive environmental assumptions. We present a novel framework for efficient and scalable real-time, onboard autonomous navigation that integrates multi-level abstraction in both perception and planning in unknown large-scale environments that change over time. Our system fuses data from multiple onboard sensors for localization and mapping and integrates it with open-vocabulary semantics to generate hierarchical scene graphs. An LLM-based planner leverages these graphs to generate high-level task execution strategies, which guide low-level controllers in safely accomplishing goals. Our framework's real-time operation enables continuous updates to scene graphs and plans, allowing swift responses to environmental changes and on-the-fly error correction. This is a key advantage over static or rule-based planning systems. We demonstrate our system's efficacy on a quadruped robot navigating large-scale, dynamic environments, showcasing its adaptability and robustness in diverse scenarios.
MultiTalk: Introspective and Extrospective Dialogue for Human-Environment-LLM Alignment
Sep 24, 2024



LLMs have shown promising results in task planning due to their strong natural language understanding and reasoning capabilities. However, issues such as hallucinations, ambiguities in human instructions, environmental constraints, and limitations in the executing agent's capabilities often lead to flawed or incomplete plans. This paper proposes MultiTalk, an LLM-based task planning methodology that addresses these issues through a framework of introspective and extrospective dialogue loops. This approach helps ground generated plans in the context of the environment and the agent's capabilities, while also resolving uncertainties and ambiguities in the given task. These loops are enabled by specialized systems designed to extract and predict task-specific states, and flag mismatches or misalignments among the human user, the LLM agent, and the environment. Effective feedback pathways between these systems and the LLM planner foster meaningful dialogue. The efficacy of this methodology is demonstrated through its application to robotic manipulation tasks. Experiments and ablations highlight the robustness and reliability of our method, and comparisons with baselines further illustrate the superiority of MultiTalk in task planning for embodied agents.
Grounding LLMs For Robot Task Planning Using Closed-loop State Feedback
Feb 13, 2024Robotic planning algorithms direct agents to perform actions within diverse environments to accomplish a task. Large Language Models (LLMs) like PaLM 2, GPT-3.5, and GPT-4 have revolutionized this domain, using their embedded real-world knowledge to tackle complex tasks involving multiple agents and objects. This paper introduces an innovative planning algorithm that integrates LLMs into the robotics context, enhancing task-focused execution and success rates. Key to our algorithm is a closed-loop feedback which provides real-time environmental states and error messages, crucial for refining plans when discrepancies arise. The algorithm draws inspiration from the human neural system, emulating its brain-body architecture by dividing planning across two LLMs in a structured, hierarchical fashion. Our method not only surpasses baselines within the VirtualHome Environment, registering a notable 35% average increase in task-oriented success rates, but achieves an impressive execution score of 85%, approaching the human-level benchmark of 94%. Moreover, effectiveness of the algorithm in real robot scenarios is shown using a realistic physics simulator and the Franka Research 3 Arm.