 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA hybrid Kolmogorov-Arnold network for medical image segmentation
Feb 07, 2026Medical image segmentation plays a vital role in diagnosis and treatment planning, but remains challenging due to the inherent complexity and variability of medical images, especially in capturing non-linear relationships within the data. We propose U-KABS, a novel hybrid framework that integrates the expressive power of Kolmogorov-Arnold Networks (KANs) with a U-shaped encoder-decoder architecture to enhance segmentation performance. The U-KABS model combines the convolutional and squeeze-and-excitation stage, which enhances channel-wise feature representations, and the KAN Bernstein Spline (KABS) stage, which employs learnable activation functions based on Bernstein polynomials and B-splines. This hybrid design leverages the global smoothness of Bernstein polynomials and the local adaptability of B-splines, enabling the model to effectively capture both broad contextual trends and fine-grained patterns critical for delineating complex structures in medical images. Skip connections between encoder and decoder layers support effective multi-scale feature fusion and preserve spatial details. Evaluated across diverse medical imaging benchmark datasets, U-KABS demonstrates superior performance compared to strong baselines, particularly in segmenting complex anatomical structures.
ProMi: An Efficient Prototype-Mixture Baseline for Few-Shot Segmentation with Bounding-Box Annotations
May 18, 2025

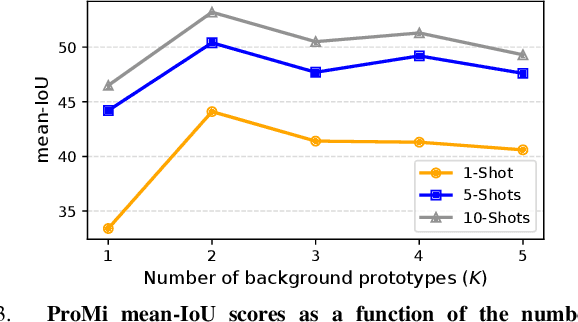

In robotics applications, few-shot segmentation is crucial because it allows robots to perform complex tasks with minimal training data, facilitating their adaptation to diverse, real-world environments. However, pixel-level annotations of even small amount of images is highly time-consuming and costly. In this paper, we present a novel few-shot binary segmentation method based on bounding-box annotations instead of pixel-level labels. We introduce, ProMi, an efficient prototype-mixture-based method that treats the background class as a mixture of distributions. Our approach is simple, training-free, and effective, accommodating coarse annotations with ease. Compared to existing baselines, ProMi achieves the best results across different datasets with significant gains, demonstrating its effectiveness. Furthermore, we present qualitative experiments tailored to real-world mobile robot tasks, demonstrating the applicability of our approach in such scenarios. Our code: https://github.com/ThalesGroup/promi.
Interactive Continual Learning Architecture for Long-Term Personalization of Home Service Robots
Mar 06, 2024


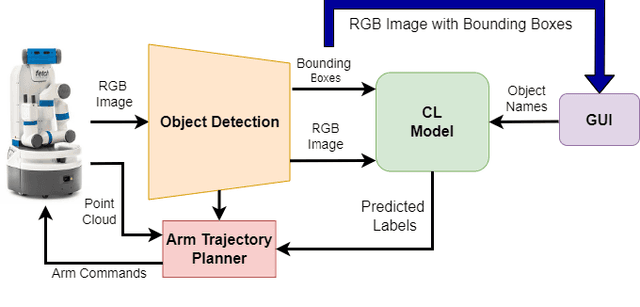
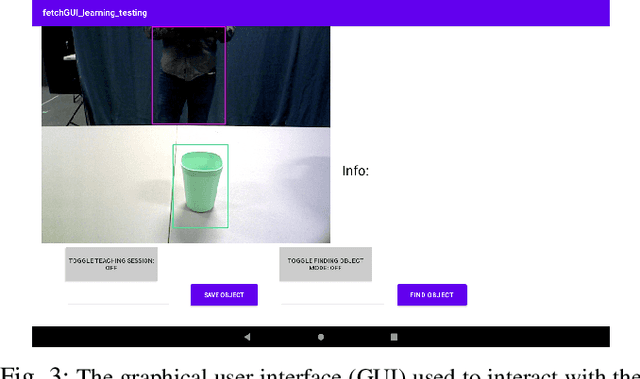
For robots to perform assistive tasks in unstructured home environments, they must learn and reason on the semantic knowledge of the environments. Despite a resurgence in the development of semantic reasoning architectures, these methods assume that all the training data is available a priori. However, each user's environment is unique and can continue to change over time, which makes these methods unsuitable for personalized home service robots. Although research in continual learning develops methods that can learn and adapt over time, most of these methods are tested in the narrow context of object classification on static image datasets. In this paper, we combine ideas from continual learning, semantic reasoning, and interactive machine learning literature and develop a novel interactive continual learning architecture for continual learning of semantic knowledge in a home environment through human-robot interaction. The architecture builds on core cognitive principles of learning and memory for efficient and real-time learning of new knowledge from humans. We integrate our architecture with a physical mobile manipulator robot and perform extensive system evaluations in a laboratory environment over two months. Our results demonstrate the effectiveness of our architecture to allow a physical robot to continually adapt to the changes in the environment from limited data provided by the users (experimenters), and use the learned knowledge to perform object fetching tasks.
CBCL-PR: A Cognitively Inspired Model for Class-Incremental Learning in Robotics
Jul 31, 2023For most real-world applications, robots need to adapt and learn continually with limited data in their environments. In this paper, we consider the problem of Few-Shot class Incremental Learning (FSIL), in which an AI agent is required to learn incrementally from a few data samples without forgetting the data it has previously learned. To solve this problem, we present a novel framework inspired by theories of concept learning in the hippocampus and the neocortex. Our framework represents object classes in the form of sets of clusters and stores them in memory. The framework replays data generated by the clusters of the old classes, to avoid forgetting when learning new classes. Our approach is evaluated on two object classification datasets resulting in state-of-the-art (SOTA) performance for class-incremental learning and FSIL. We also evaluate our framework for FSIL on a robot demonstrating that the robot can continually learn to classify a large set of household objects with limited human assistance.
Adapting to Human Preferences to Lead or Follow in Human-Robot Collaboration: A System Evaluation
Jul 20, 2023



With the introduction of collaborative robots, humans and robots can now work together in close proximity and share the same workspace. However, this collaboration presents various challenges that need to be addressed to ensure seamless cooperation between the agents. This paper focuses on task planning for human-robot collaboration, taking into account the human's performance and their preference for following or leading. Unlike conventional task allocation methods, the proposed system allows both the robot and human to select and assign tasks to each other. Our previous studies evaluated the proposed framework in a computer simulation environment. This paper extends the research by implementing the algorithm in a real scenario where a human collaborates with a Fetch mobile manipulator robot. We briefly describe the experimental setup, procedure and implementation of the planned user study. As a first step, in this paper, we report on a system evaluation study where the experimenter enacted different possible behaviours in terms of leader/follower preferences that can occur in a user study. Results show that the robot can adapt and respond appropriately to different human agent behaviours, enacted by the experimenter. A future user study will evaluate the system with human participants.
Active Class Selection for Few-Shot Class-Incremental Learning
Jul 05, 2023For real-world applications, robots will need to continually learn in their environments through limited interactions with their users. Toward this, previous works in few-shot class incremental learning (FSCIL) and active class selection (ACS) have achieved promising results but were tested in constrained setups. Therefore, in this paper, we combine ideas from FSCIL and ACS to develop a novel framework that can allow an autonomous agent to continually learn new objects by asking its users to label only a few of the most informative objects in the environment. To this end, we build on a state-of-the-art (SOTA) FSCIL model and extend it with techniques from ACS literature. We term this model Few-shot Incremental Active class SeleCtiOn (FIASco). We further integrate a potential field-based navigation technique with our model to develop a complete framework that can allow an agent to process and reason on its sensory data through the FIASco model, navigate towards the most informative object in the environment, gather data about the object through its sensors and incrementally update the FIASco model. Experimental results on a simulated agent and a real robot show the significance of our approach for long-term real-world robotics applications.
A Personalized Household Assistive Robot that Learns and Creates New Breakfast Options through Human-Robot Interaction
Jun 30, 2023For robots to assist users with household tasks, they must first learn about the tasks from the users. Further, performing the same task every day, in the same way, can become boring for the robot's user(s), therefore, assistive robots must find creative ways to perform tasks in the household. In this paper, we present a cognitive architecture for a household assistive robot that can learn personalized breakfast options from its users and then use the learned knowledge to set up a table for breakfast. The architecture can also use the learned knowledge to create new breakfast options over a longer period of time. The proposed cognitive architecture combines state-of-the-art perceptual learning algorithms, computational implementation of cognitive models of memory encoding and learning, a task planner for picking and placing objects in the household, a graphical user interface (GUI) to interact with the user and a novel approach for creating new breakfast options using the learned knowledge. The architecture is integrated with the Fetch mobile manipulator robot and validated, as a proof-of-concept system evaluation in a large indoor environment with multiple kitchen objects. Experimental results demonstrate the effectiveness of our architecture to learn personalized breakfast options from the user and generate new breakfast options never learned by the robot.
How Do Human Users Teach a Continual Learning Robot in Repeated Interactions?
Jun 30, 2023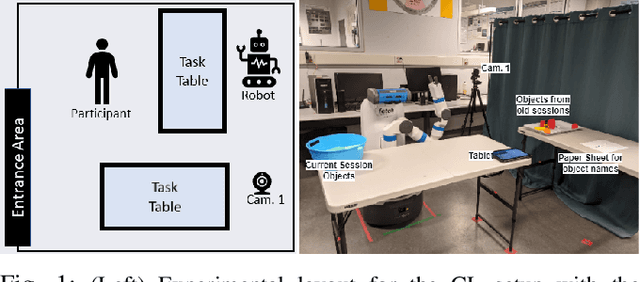
Continual learning (CL) has emerged as an important avenue of research in recent years, at the intersection of Machine Learning (ML) and Human-Robot Interaction (HRI), to allow robots to continually learn in their environments over long-term interactions with humans. Most research in continual learning, however, has been robot-centered to develop continual learning algorithms that can quickly learn new information on static datasets. In this paper, we take a human-centered approach to continual learning, to understand how humans teach continual learning robots over the long term and if there are variations in their teaching styles. We conducted an in-person study with 40 participants that interacted with a continual learning robot in 200 sessions. In this between-participant study, we used two different CL models deployed on a Fetch mobile manipulator robot. An extensive qualitative and quantitative analysis of the data collected in the study shows that there is significant variation among the teaching styles of individual users indicating the need for personalized adaptation to their distinct teaching styles. The results also show that although there is a difference in the teaching styles between expert and non-expert users, the style does not have an effect on the performance of the continual learning robot. Finally, our analysis shows that the constrained experimental setups that have been widely used to test most continual learning techniques are not adequate, as real users interact with and teach continual learning robots in a variety of ways. Our code is available at https://github.com/aliayub7/cl_hri.
Continual Learning through Human-Robot Interaction -- Human Perceptions of a Continual Learning Robot in Repeated Interactions
May 22, 2023For long-term deployment in dynamic real-world environments, assistive robots must continue to learn and adapt to their environments. Researchers have developed various computational models for continual learning (CL) that can allow robots to continually learn from limited training data, and avoid forgetting previous knowledge. While these CL models can mitigate forgetting on static, systematically collected datasets, it is unclear how human users might perceive a robot that continually learns over multiple interactions with them. In this paper, we developed a system that integrates CL models for object recognition with a Fetch mobile manipulator robot and allows human participants to directly teach and test the robot over multiple sessions. We conducted an in-person study with 60 participants who interacted with our system in 300 sessions (5 sessions per participant). We conducted a between-participant study with three different CL models (3 experimental conditions) to understand human perceptions of continual learning robots over multiple sessions. Our results suggest that participants' perceptions of trust, competence, and usability of a continual learning robot significantly decrease over multiple sessions if the robot forgets previously learned objects. However, the perceived task load on participants for teaching and testing the robot remains the same over multiple sessions even if the robot forgets previously learned objects. Our results also indicate that state-of-the-art CL models might perform unreliably when applied to robots interacting with human participants. Further, continual learning robots are not perceived as very trustworthy or competent by human participants, regardless of the underlying continual learning model or the session number.
Few-Shot Continual Active Learning by a Robot
Oct 09, 2022


In this paper, we consider a challenging but realistic continual learning (CL) problem, Few-Shot Continual Active Learning (FoCAL), where a CL agent is provided with unlabeled data for a new or a previously learned task in each increment and the agent only has limited labeling budget available. Towards this, we build on the continual learning and active learning literature and develop a framework that can allow a CL agent to continually learn new object classes from a few labeled training examples. Our framework represents each object class using a uniform Gaussian mixture model (GMM) and uses pseudo-rehearsal to mitigate catastrophic forgetting. The framework also uses uncertainty measures on the Gaussian representations of the previously learned classes to find the most informative samples to be labeled in an increment. We evaluate our approach on the CORe-50 dataset and on a real humanoid robot for the object classification task. The results show that our approach not only produces state-of-the-art results on the dataset but also allows a real robot to continually learn unseen objects in a real environment with limited labeling supervision provided by its user.