 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Continual Active Learning by a Robot
Oct 09, 2022


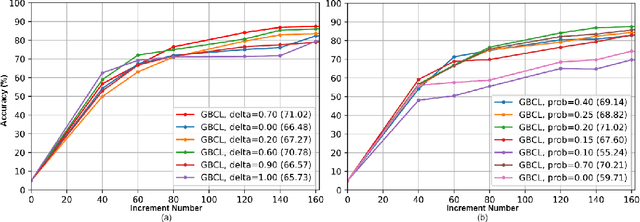
In this paper, we consider a challenging but realistic continual learning (CL) problem, Few-Shot Continual Active Learning (FoCAL), where a CL agent is provided with unlabeled data for a new or a previously learned task in each increment and the agent only has limited labeling budget available. Towards this, we build on the continual learning and active learning literature and develop a framework that can allow a CL agent to continually learn new object classes from a few labeled training examples. Our framework represents each object class using a uniform Gaussian mixture model (GMM) and uses pseudo-rehearsal to mitigate catastrophic forgetting. The framework also uses uncertainty measures on the Gaussian representations of the previously learned classes to find the most informative samples to be labeled in an increment. We evaluate our approach on the CORe-50 dataset and on a real humanoid robot for the object classification task. The results show that our approach not only produces state-of-the-art results on the dataset but also allows a real robot to continually learn unseen objects in a real environment with limited labeling supervision provided by its user.
If you Cheat, I Cheat: Cheating on a Collaborative Task with a Social Robot
Jun 30, 2021



Robots may soon play a role in higher education by augmenting learning environments and managing interactions between instructors and learners. Little, however, is known about how the presence of robots in the learning environment will influence academic integrity. This study therefore investigates if and how college students cheat while engaged in a collaborative sorting task with a robot. We employed a 2x2 factorial design to examine the effects of cheating exposure (exposure to cheating or no exposure) and task clarity (clear or vague rules) on college student cheating behaviors while interacting with a robot. Our study finds that prior exposure to cheating on the task significantly increases the likelihood of cheating. Yet, the tendency to cheat was not impacted by the clarity of the task rules. These results suggest that normative behavior by classmates may strongly influence the decision to cheat while engaged in an instructional experience with a robot.