 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Forget to Buy Milk: Contextually Aware Grocery Reminder Household Robot
Paper and Code
Jul 20, 2022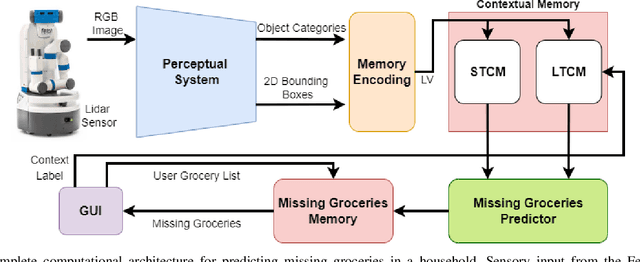

Assistive robots operating in household environments would require items to be available in the house to perform assistive tasks. However, when these items run out, the assistive robot must remind its user to buy the missing items. In this paper, we present a computational architecture that can allow a robot to learn personalized contextual knowledge of a household through interactions with its user. The architecture can then use the learned knowledge to make predictions about missing items from the household over a long period of time. The architecture integrates state-of-the-art perceptual learning algorithms, cognitive models of memory encoding and learning, a reasoning module for predicting missing items from the household, and a graphical user interface (GUI) to interact with the user. The architecture is integrated with the Fetch mobile manipulator robot and validated in a large indoor environment with multiple contexts and objects. Our experimental results show that the robot can adapt to an environment by learning contextual knowledge through interactions with its user. The robot can also use the learned knowledge to correctly predict missing items over multiple weeks and it is robust against sensory and perceptual errors.