 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThroughput Optimization in UAV-Mounted RIS under Jittering and Imperfect CSI via DRL
Dec 31, 2025Reconfigurable intelligent surfaces (RISs) mounted on unmanned aerial vehicles (UAVs) can reshape wireless propagation on-demand. However, their performance is sensitive to UAV jitter and cascaded channel uncertainty. This paper investigates a downlink multiple-input single-output UAV-mounted RIS system in which a ground multiple-antenna base station (BS) serves multiple single-antenna users under practical impairments. Our goal is to maximize the expected throughput under stochastic three-dimensional UAV jitter and imperfect cascaded channel state information (CSI) based only on the available channel estimates. This leads to a stochastic nonconvex optimization problem subject to a BS transmit power constraint and strict unit-modulus constraints on all RIS elements. To address this problem, we design a model-free deep reinforcement learning (DRL) framework with a contextual bandit formulation. A differentiable feasibility layer is utilized to map continuous actions to feasible solutions, while the reward is a Monte Carlo estimate of the expected throughput. We instantiate this framework with constrained variants of deep deterministic policy gradient (DDPG) and twin delayed deep deterministic policy gradient (TD3) that do not use target networks. Simulations show that the proposed algorithms yield higher throughput than conventional alternating optimization-based weighted minimum mean-square error (AO-WMMSE) baselines under severe jitter and low CSI quality. Across different scenarios, the proposed methods achieve performance that is either comparable to or slightly below the AO-WMMSE benchmark, based on sample average approximation (SAA) with a relative gap ranging from 0-12%. Moreover, the proposed DRL controllers achieve online inference times of 0.6 ms per decision versus roughly 370-550 ms for AO-WMMSE solvers.
Effective Capacity Analysis of Joint Near and Far-Field Communication in 6G URLLC Networks
Nov 11, 2025The emergence of 6G networks enables simultaneous near-field and far-field communications through extremely large antenna arrays and high carrier frequencies. While these regimes enhance spatial multiplexing and link capacity, their coexistence poses new challenges in ensuring quality-of-service (QoS) guarantees for delay-sensitive applications. This paper presents an effective capacity (EC) analysis framework that jointly models near- and far-field communication regimes under distance estimation uncertainty. The user location is modeled as a random variable spanning both propagation regions, and tractable closed-form expression for the EC is derived to quantify delay performance. Numerical results illustrate the impact of estimation variance, QoS exponent, far-field boundary and near-field boundary (Fraunhofer distance) on EC performance.
Intelligent Spectrum Sharing in Integrated TN-NTNs: A Hierarchical Deep Reinforcement Learning Approach
Mar 09, 2025Integrating non-terrestrial networks (NTNs) with terrestrial networks (TNs) is key to enhancing coverage, capacity, and reliability in future wireless communications. However, the multi-tier, heterogeneous architecture of these integrated TN-NTNs introduces complex challenges in spectrum sharing and interference management. Conventional optimization approaches struggle to handle the high-dimensional decision space and dynamic nature of these networks. This paper proposes a novel hierarchical deep reinforcement learning (HDRL) framework to address these challenges and enable intelligent spectrum sharing. The proposed framework leverages the inherent hierarchy of the network, with separate policies for each tier, to learn and optimize spectrum allocation decisions at different timescales and levels of abstraction. By decomposing the complex spectrum sharing problem into manageable sub-tasks and allowing for efficient coordination among the tiers, the HDRL approach offers a scalable and adaptive solution for spectrum management in future TN-NTNs. Simulation results demonstrate the superior performance of the proposed framework compared to traditional approaches, highlighting its potential to enhance spectral efficiency and network capacity in dynamic, multi-tier environments.
Advancements in UAV-based Integrated Sensing and Communication: A Comprehensive Survey
Jan 11, 2025Unmanned aerial vehicle (UAV)-based integrated sensing and communication (ISAC) systems are poised to revolutionize next-generation wireless networks by enabling simultaneous sensing and communication (S\&C). This survey comprehensively reviews UAV-ISAC systems, highlighting foundational concepts, key advancements, and future research directions. We explore recent advancements in UAV-based ISAC systems from various perspectives and objectives, including advanced channel estimation (CE), beam tracking, and system throughput optimization under joint sensing and communication S\&C constraints. Additionally, we examine weighted sum rate (WSR) and sensing trade-offs, delay and age of information (AoI) minimization, energy efficiency (EE), and security enhancement. These applications highlight the potential of UAV-based ISAC systems to improve spectrum utilization, enhance communication reliability, reduce latency, and optimize energy consumption across diverse domains, including smart cities, disaster relief, and defense operations. The survey also features summary tables for comparative analysis of existing methodologies, emphasizing performance, limitations, and effectiveness in addressing various challenges. By synthesizing recent advancements and identifying open research challenges, this survey aims to be a valuable resource for developing efficient, adaptive, and secure UAV-based ISAC systems.
RIS-Assisted Aerial Non-Terrestrial Networks: An Intelligent Synergy with Deep Reinforcement Learning
Dec 25, 2024Reconfigurable intelligent surface (RIS)-assisted aerial non-terrestrial networks (NTNs) offer a promising paradigm for enhancing wireless communications in the era of 6G and beyond. By integrating RIS with aerial platforms such as unmanned aerial vehicles (UAVs) and high-altitude platforms (HAPs), these networks can intelligently control signal propagation, extending coverage, improving capacity, and enhancing link reliability. This article explores the application of deep reinforcement learning (DRL) as a powerful tool for optimizing RIS-assisted aerial NTNs. We focus on hybrid proximal policy optimization (H-PPO), a robust DRL algorithm well-suited for handling the complex, hybrid action spaces inherent in these networks. Through a case study of an aerial RIS (ARIS)-aided coordinated multi-point non-orthogonal multiple access (CoMP-NOMA) network, we demonstrate how H-PPO can effectively optimize the system and maximize the sum rate while adhering to system constraints. Finally, we discuss key challenges and promising research directions for DRL-powered RIS-assisted aerial NTNs, highlighting their potential to transform next-generation wireless networks.
Unsupervised Learning Approach for Beamforming in Cell-Free Integrated Sensing and Communication
Dec 24, 2024



Cell-free massive multiple input multiple output (MIMO) systems can provide reliable connectivity and increase user throughput and spectral efficiency of integrated sensing and communication (ISAC) systems. This can only be achieved through intelligent beamforming design. While many works have proposed optimization methods to design beamformers for cell-free systems, the underlying algorithms are computationally complex and potentially increase fronthaul link loads. To address this concern, we propose an unsupervised learning algorithm to jointly design the communication and sensing beamformers for cell-free ISAC system. Specifically, we adopt a teacher-student training model to guarantee a balanced maximization of sensing signal to noise ratio (SSNR) and signal to interference plus noise ratio (SINR), which represent the sensing and communication metrics, respectively. The proposed scheme is decentralized, which can reduce the load on the central processing unit (CPU) and the required fronthaul links. To avoid the tradeoff problem between sensing and communication counterparts of the cell-free system, we first train two identical models (teacher models) each biased towards one of the two tasks. A third identical model (a student model) is trained based on the maximum sensing and communication performance information obtained by the teacher models. While the results show that our proposed unsupervised DL approach yields a performance close to the state-of-the-art solution, the proposed approach is more computationally efficient than the state of the art by at least three orders of magnitude.
Performance Analysis and Optimization of Multi-RIS-Aided UAV Networks
Mar 18, 2023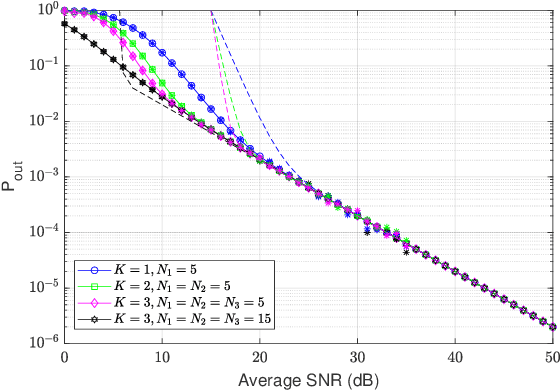

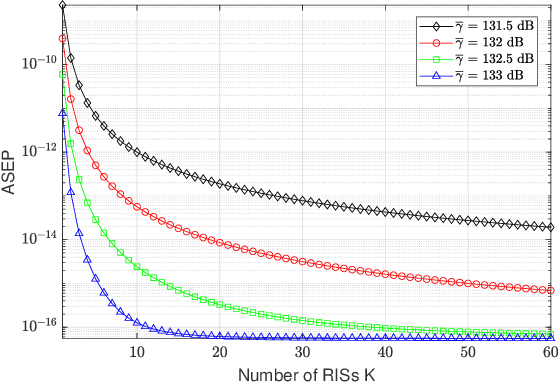

In this paper, we study the performance of multiple reconfigurable intelligent surfaces (RISs)-aided unmanned aerial vehicle (UAV) communication networks over Nakagami-$m$ fading channels. For that purpose, we used accurate closed-form approximations for the channel distributions to derive closed-form approximations for the outage probability (OP), average symbol error probability (ASEP), and the average channel capacity assuming independent non-identically distributed (i.ni.d.) channels. Furthermore, we derive the asymptotic OP at the high signal-to-noise ratio (SNR) regime to get more insights into the system performance. We also study some practical scenarios related to RISs, UAV, and destination locations and illustrate their impact on the system performance through simulations. Finally, we provide an optimization problem on the transmit power of each channel.
Multiple RISs-Aided Networks: Performance Analysis and Optimization
Jun 11, 2022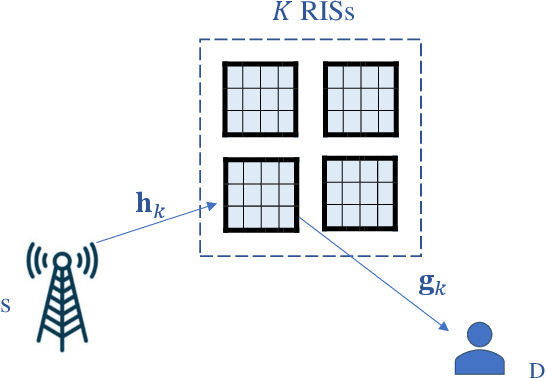
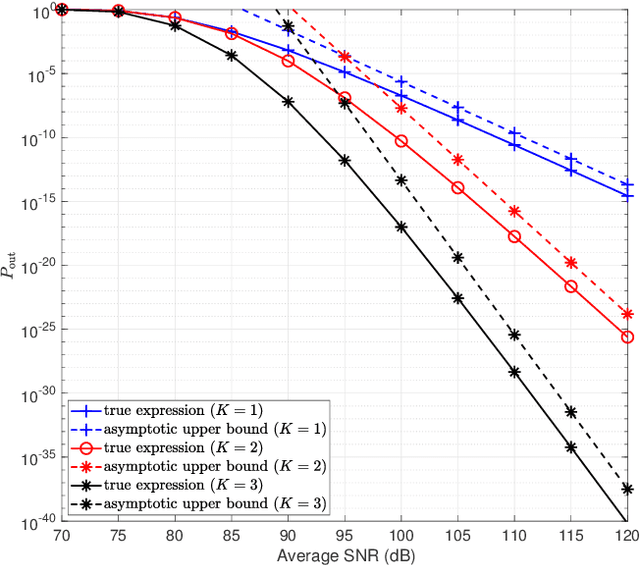
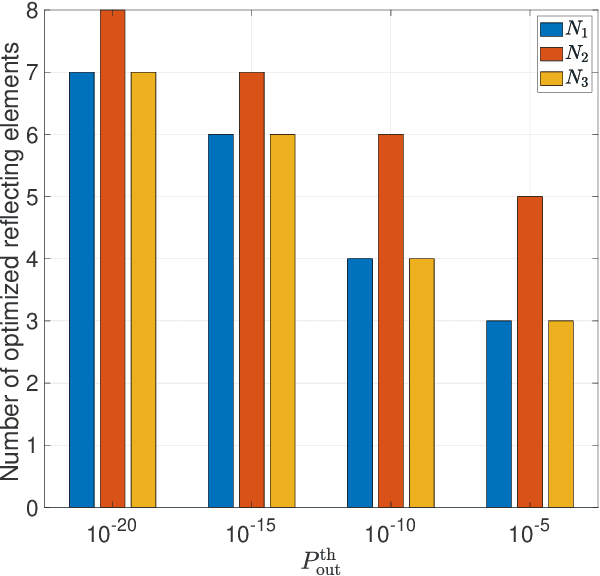
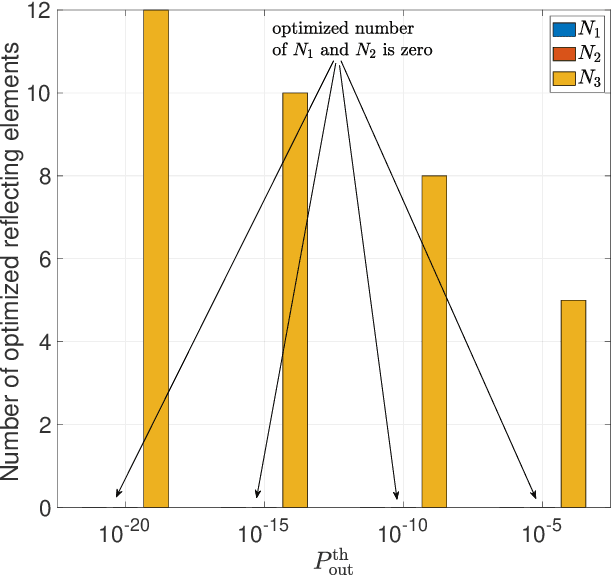
This paper analyzes the performance of multiple reconfigurable intelligent surfaces (RISs)-aided networks. The paper also provides some optimization results on the number of reflecting elements on RISs and the optimal placement of RISs. We first derive accurate closed-form approximations for RIS channels' distributions assuming independent non-identically distributed (i.ni.d.) Nakagami-\emph{m} fading environment. Then, the approximate expressions for outage probability (OP) and average symbol error probability are derived in closed-form. Furthermore, to get more insights into the system performance, we derive the asymptotic OP at the high signal-to-noise ratio regime and provide closed-form expressions for the system diversity order and coding gain. Finally, the accuracy of our theoretical analysis is validated through Monte-Carlo simulations. The obtained results show that the considered RIS scenario can provide a diversity order of $\frac{a}{2}K$, where $a$ is a function of the Nakagami fading parameter $m$ and the number of meta-surface elements $N$, and $K$ is the number of RISs.