 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Learning Object Properties
Jan 15, 2023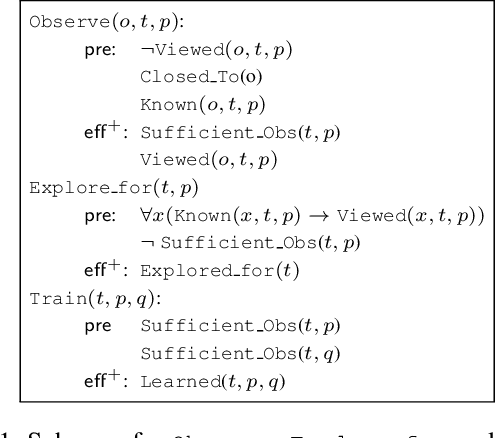
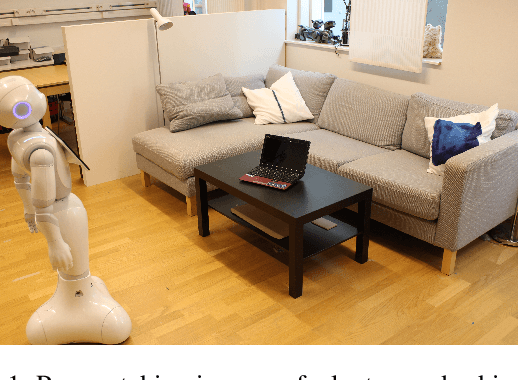
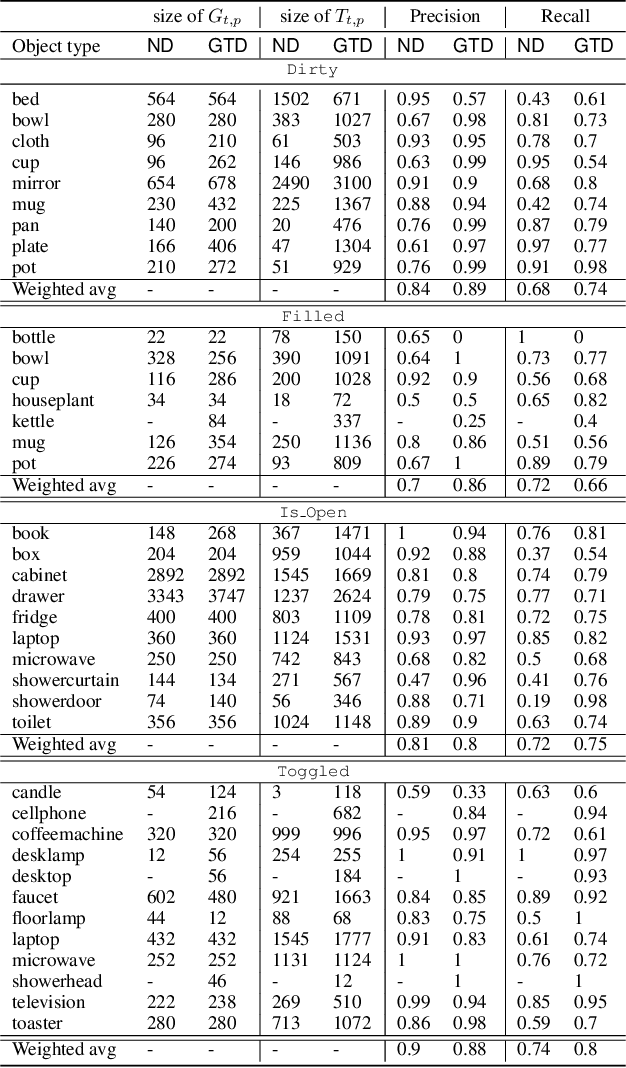
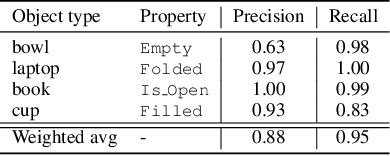
Autonomous agents embedded in a physical environment need the ability to recognize objects and their properties from sensory data. Such a perceptual ability is often implemented by supervised machine learning models, which are pre-trained using a set of labelled data. In real-world, open-ended deployments, however, it is unrealistic to assume to have a pre-trained model for all possible environments. Therefore, agents need to dynamically learn/adapt/extend their perceptual abilities online, in an autonomous way, by exploring and interacting with the environment where they operate. This paper describes a way to do so, by exploiting symbolic planning. Specifically, we formalize the problem of automatically training a neural network to recognize object properties as a symbolic planning problem (using PDDL). We use planning techniques to produce a strategy for automating the training dataset creation and the learning process. Finally, we provide an experimental evaluation in both a simulated and a real environment, which shows that the proposed approach is able to successfully learn how to recognize new object properties.
Online Grounding of PDDL Domains by Acting and Sensing in Unknown Environments
Dec 18, 2021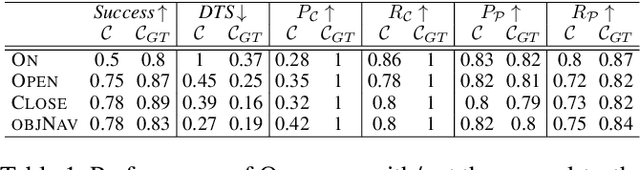
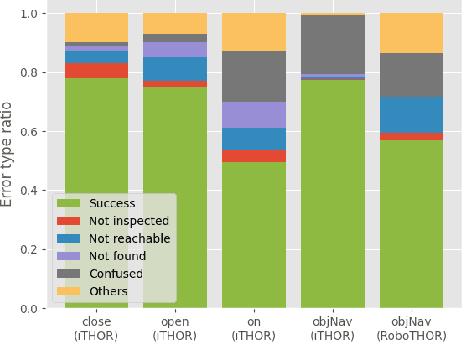
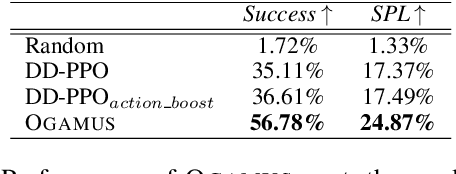
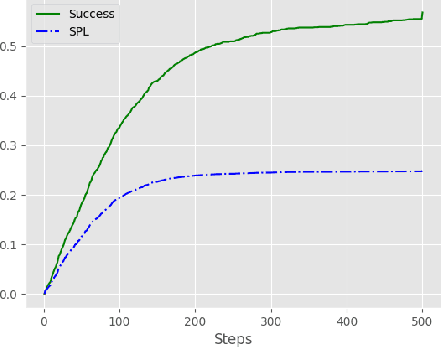
To effectively use an abstract (PDDL) planning domain to achieve goals in an unknown environment, an agent must instantiate such a domain with the objects of the environment and their properties. If the agent has an egocentric and partial view of the environment, it needs to act, sense, and abstract the perceived data in the planning domain. Furthermore, the agent needs to compile the plans computed by a symbolic planner into low level actions executable by its actuators. This paper proposes a framework that aims to accomplish the aforementioned perspective and allows an agent to perform different tasks. For this purpose, we integrate machine learning models to abstract the sensory data, symbolic planning for goal achievement and path planning for navigation. We evaluate the proposed method in accurate simulated environments, where the sensors are RGB-D on-board camera, GPS and compass.
Planning with Partial Preference Models
Jan 12, 2011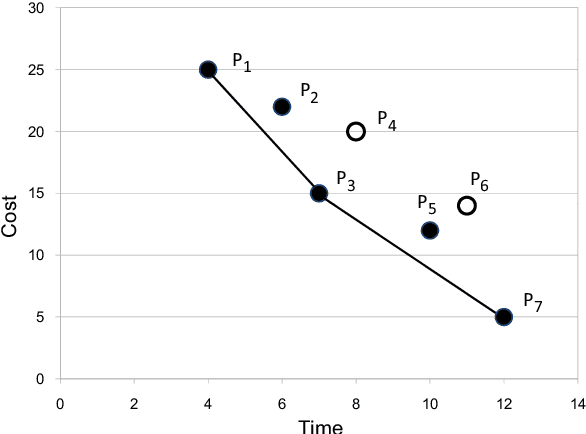
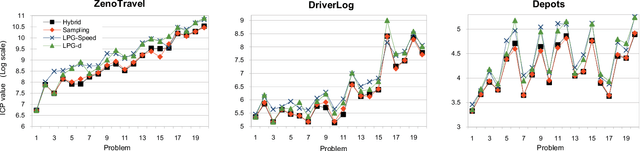
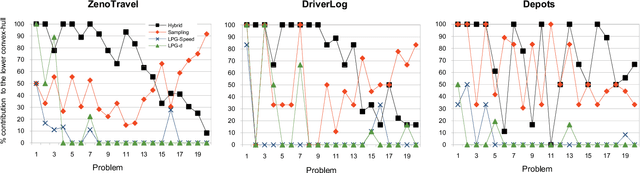
Current work in planning with preferences assume that the user's preference models are completely specified and aim to search for a single solution plan. In many real-world planning scenarios, however, the user probably cannot provide any information about her desired plans, or in some cases can only express partial preferences. In such situations, the planner has to present not only one but a set of plans to the user, with the hope that some of them are similar to the plan she prefers. We first propose the usage of different measures to capture quality of plan sets that are suitable for such scenarios: domain-independent distance measures defined based on plan elements (actions, states, causal links) if no knowledge of the user's preferences is given, and the Integrated Convex Preference measure in case the user's partial preference is provided. We then investigate various heuristic approaches to find set of plans according to these measures, and present empirical results demonstrating the promise of our approach.