 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Learning Object Properties
Jan 15, 2023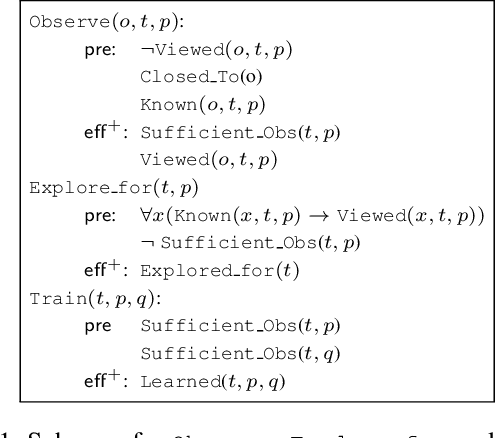
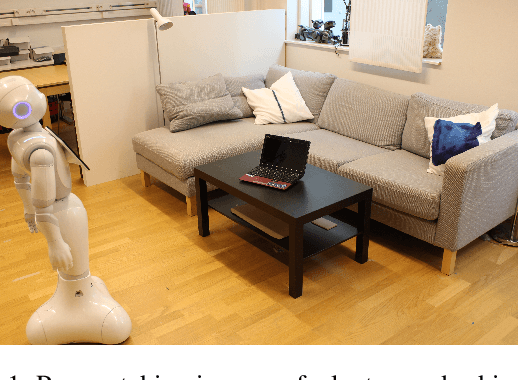
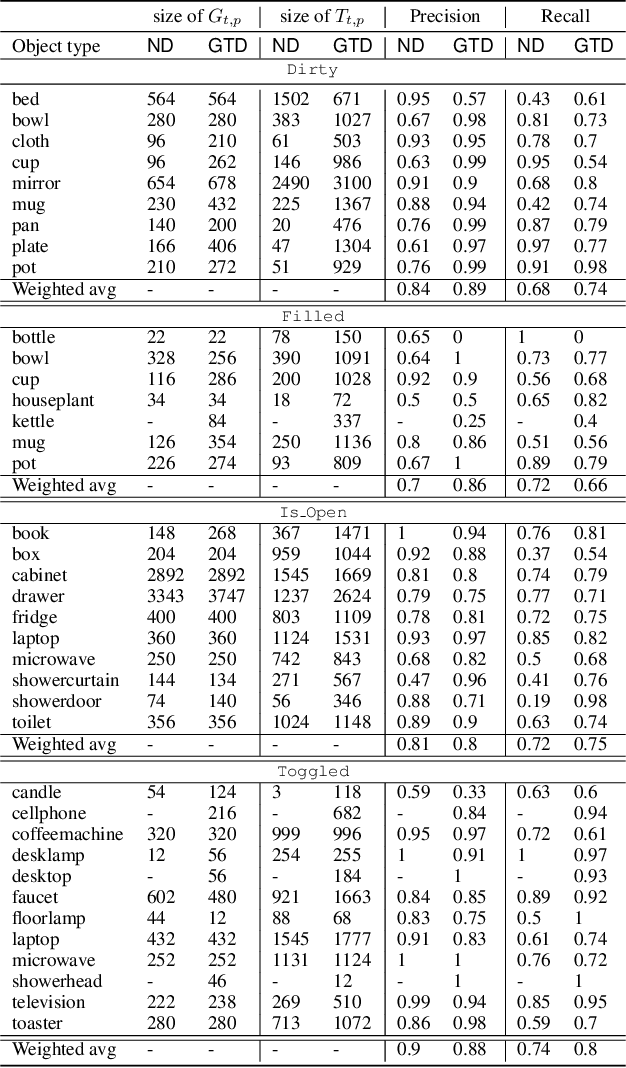
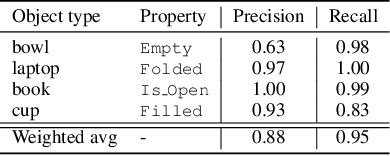
Autonomous agents embedded in a physical environment need the ability to recognize objects and their properties from sensory data. Such a perceptual ability is often implemented by supervised machine learning models, which are pre-trained using a set of labelled data. In real-world, open-ended deployments, however, it is unrealistic to assume to have a pre-trained model for all possible environments. Therefore, agents need to dynamically learn/adapt/extend their perceptual abilities online, in an autonomous way, by exploring and interacting with the environment where they operate. This paper describes a way to do so, by exploiting symbolic planning. Specifically, we formalize the problem of automatically training a neural network to recognize object properties as a symbolic planning problem (using PDDL). We use planning techniques to produce a strategy for automating the training dataset creation and the learning process. Finally, we provide an experimental evaluation in both a simulated and a real environment, which shows that the proposed approach is able to successfully learn how to recognize new object properties.
Online Grounding of PDDL Domains by Acting and Sensing in Unknown Environments
Dec 18, 2021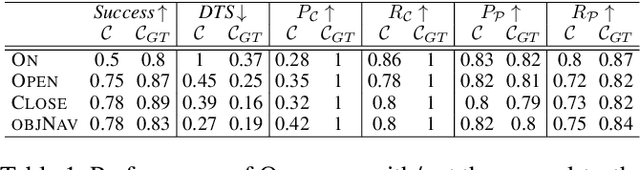
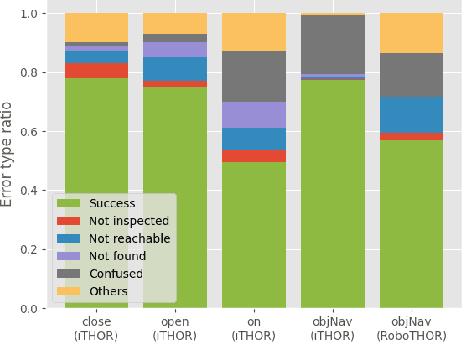
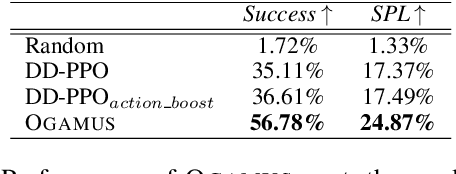
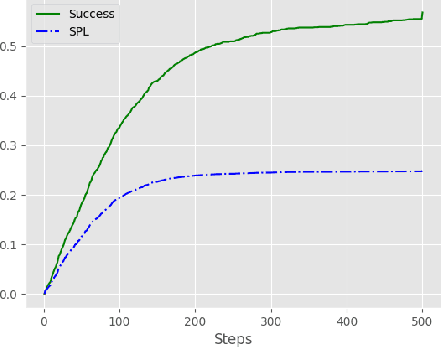
To effectively use an abstract (PDDL) planning domain to achieve goals in an unknown environment, an agent must instantiate such a domain with the objects of the environment and their properties. If the agent has an egocentric and partial view of the environment, it needs to act, sense, and abstract the perceived data in the planning domain. Furthermore, the agent needs to compile the plans computed by a symbolic planner into low level actions executable by its actuators. This paper proposes a framework that aims to accomplish the aforementioned perspective and allows an agent to perform different tasks. For this purpose, we integrate machine learning models to abstract the sensory data, symbolic planning for goal achievement and path planning for navigation. We evaluate the proposed method in accurate simulated environments, where the sensors are RGB-D on-board camera, GPS and compass.
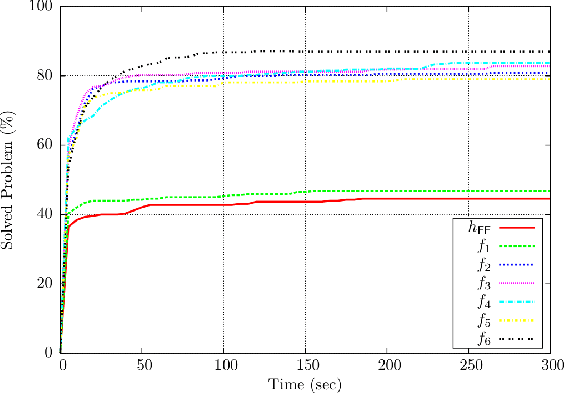
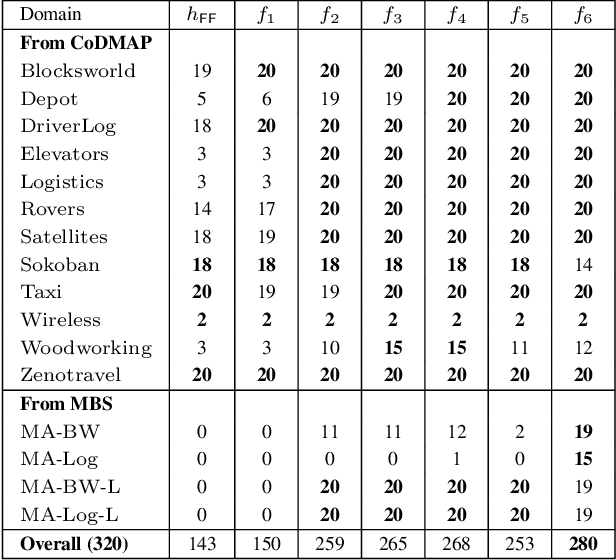
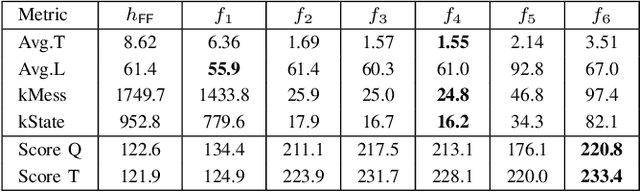
Novelty Messages Filtering for Multi Agent Privacy-preserving Planning
Jun 18, 2019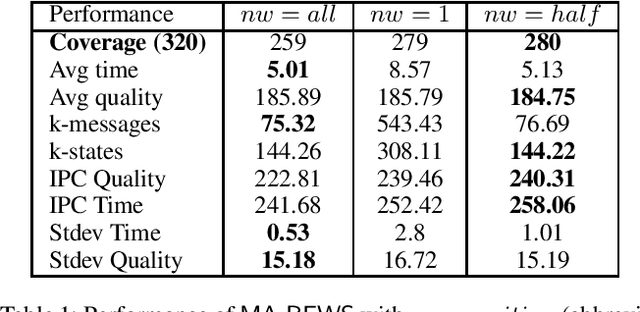
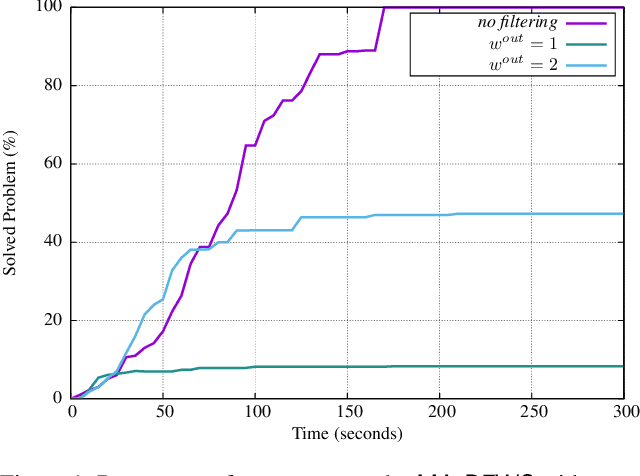
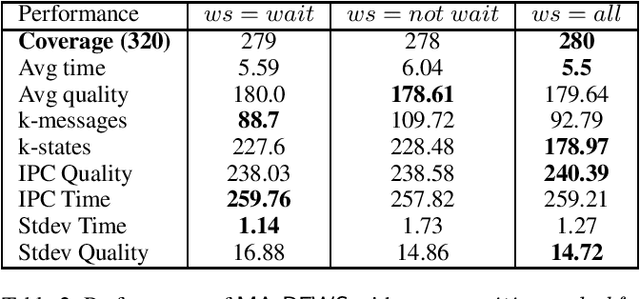
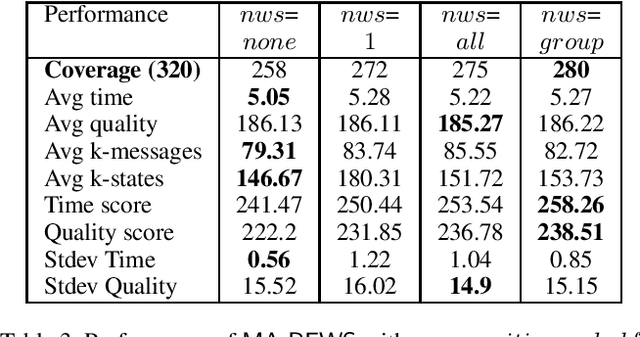
In multi-agent planning, agents jointly compute a plan that achieves mutual goals, keeping certain information private to the individual agents. Agents' coordination is achieved through the transmission of messages. These messages can be a source of privacy leakage as they can permit a malicious agent to collect information about other agents' actions and search states. In this paper, we investigate the usage of novelty techniques in the context of (decentralised) multi-agent privacy-preserving planning, addressing the challenges related to the agents' privacy and performance. In particular, we show that the use of novelty based techniques can significantly reduce the number of messages transmitted among agents, better preserving their privacy and improving their performance. An experimental study analyses the effectiveness of our techniques and compares them with the state-of-the-art. Finally, we evaluate the robustness of our approach, considering different delays in the transmission of messages as they would occur in overloaded networks, due for example to massive attacks or critical situations.
Best-First Width Search for Multi Agent Privacy-preserving Planning
Jun 10, 2019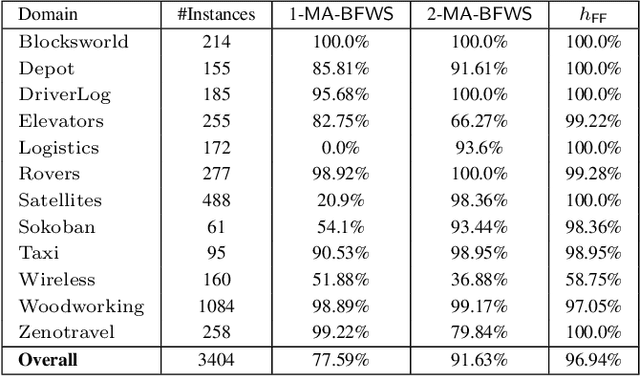
In multi-agent planning, preserving the agents' privacy has become an increasingly popular research topic. For preserving the agents' privacy, agents jointly compute a plan that achieves mutual goals by keeping certain information private to the individual agents. Unfortunately, this can severely restrict the accuracy of the heuristic functions used while searching for solutions. It has been recently shown that, for centralized planning, the performance of goal oriented search can be improved by combining goal oriented search and width-based search. The combination of these techniques has been called best-first width search. In this paper, we investigate the usage of best-first width search in the context of (decentralised) multi-agent privacy-preserving planning, addressing the challenges related to the agents' privacy and performance. In particular, we show that best-first width search is a very effective approach over several benchmark domains, even when the search is driven by heuristics that roughly estimate the distance from goal states, computed without using the private information of other agents. An experimental study analyses the effectiveness of our techniques and compares them with the state-of-the-art.