 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-term Power Grid Planning via Answer Set Programming
May 19, 2026The Power grid is a critical infrastructure underpinning all aspects of modern society and its services. Maintaining its effectiveness requires continuous adaptations. In particular, addressing sustainability targets, demand patterns, and urbanisation trends requires implementing changes to the network. Actual developments can potentially span over a decade, with supply continuity and service quality that must be preserved throughout by ensuring conformance to several topological and combinatorial invariants. Long-term power grid planning deals with the above process, and although planning languages could be a natural choice, the kind of properties and invariants needed are cumbersome to express in such languages; on the contrary, they can be elegantly and succinctly encoded in Answer Set Programming (ASP). In this paper, we propose the first approach to automate and optimise the long-term power grid planning process using ASP. Experimental evaluations conducted on synthetic and real-world grid data confirm the expressive power of the proposed ASP-based approach and demonstrate its effectiveness.
Goal Recognition as a Deep Learning Task: the GRNet Approach
Oct 05, 2022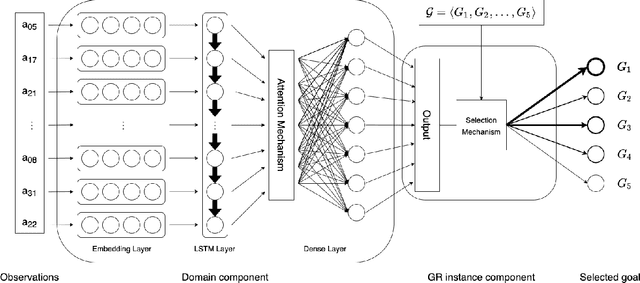
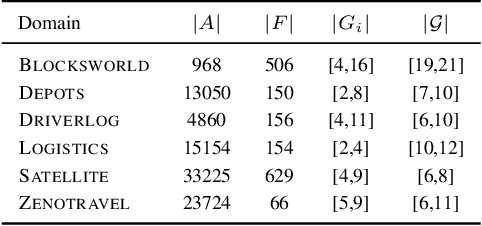
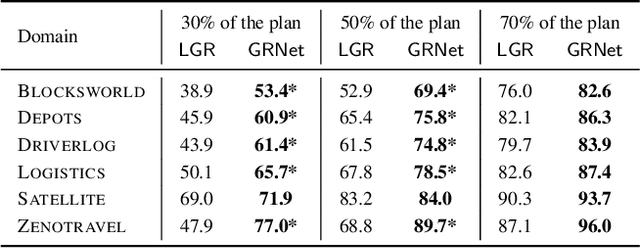
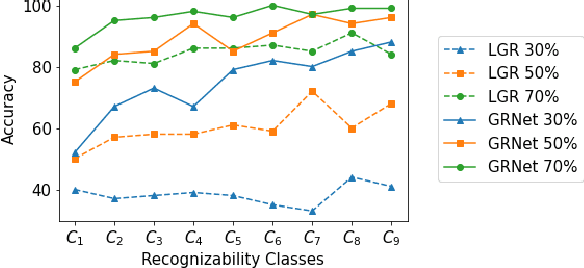
In automated planning, recognising the goal of an agent from a trace of observations is an important task with many applications. The state-of-the-art approaches to goal recognition rely on the application of planning techniques, which requires a model of the domain actions and of the initial domain state (written, e.g., in PDDL). We study an alternative approach where goal recognition is formulated as a classification task addressed by machine learning. Our approach, called GRNet, is primarily aimed at making goal recognition more accurate as well as faster by learning how to solve it in a given domain. Given a planning domain specified by a set of propositions and a set of action names, the goal classification instances in the domain are solved by a Recurrent Neural Network (RNN). A run of the RNN processes a trace of observed actions to compute how likely it is that each domain proposition is part of the agent's goal, for the problem instance under considerations. These predictions are then aggregated to choose one of the candidate goals. The only information required as input of the trained RNN is a trace of action labels, each one indicating just the name of an observed action. An experimental analysis confirms that \our achieves good performance in terms of both goal classification accuracy and runtime, obtaining better performance w.r.t. a state-of-the-art goal recognition system over the considered benchmarks.
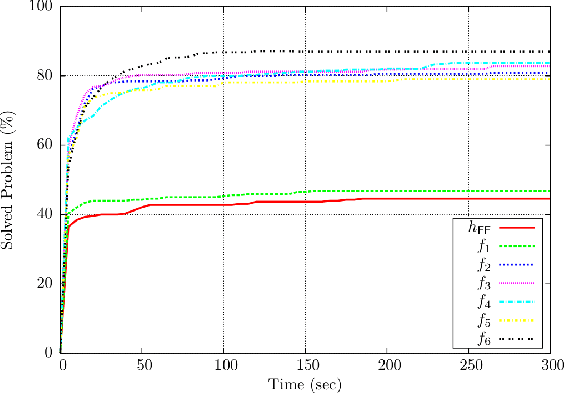
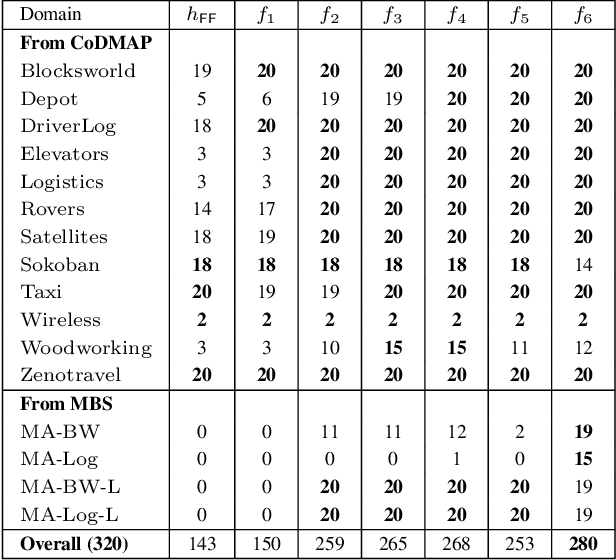
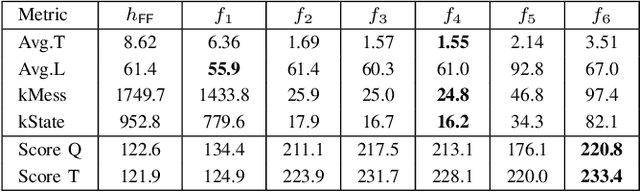
Novelty Messages Filtering for Multi Agent Privacy-preserving Planning
Jun 18, 2019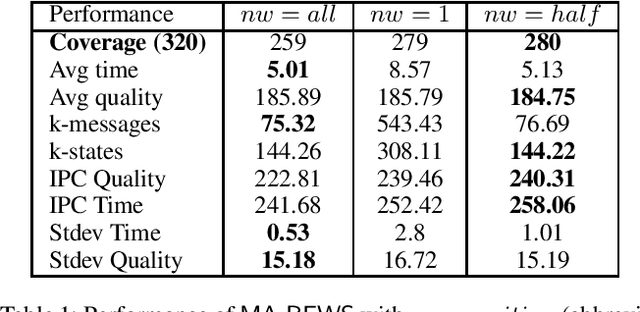
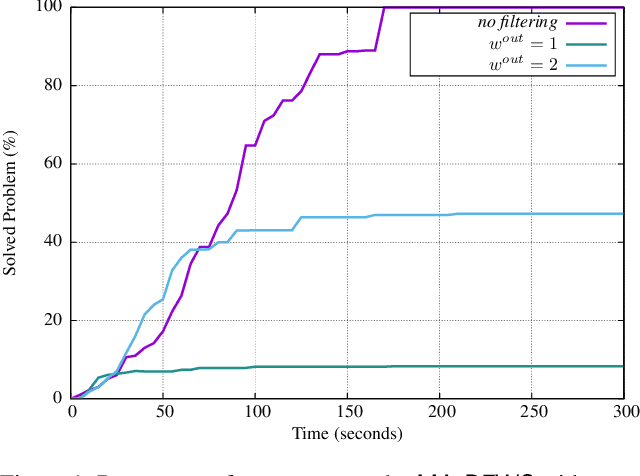
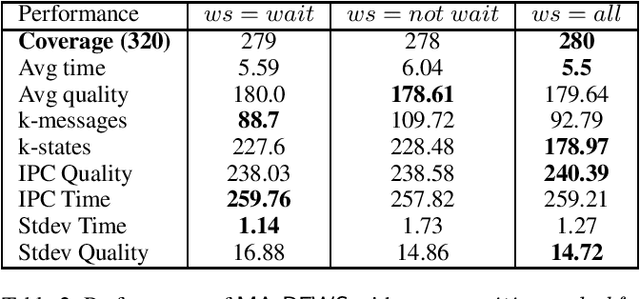
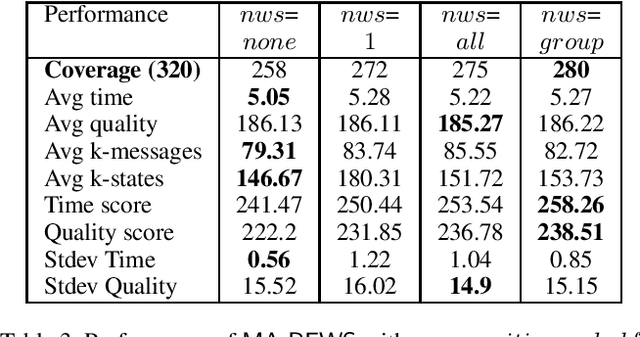
In multi-agent planning, agents jointly compute a plan that achieves mutual goals, keeping certain information private to the individual agents. Agents' coordination is achieved through the transmission of messages. These messages can be a source of privacy leakage as they can permit a malicious agent to collect information about other agents' actions and search states. In this paper, we investigate the usage of novelty techniques in the context of (decentralised) multi-agent privacy-preserving planning, addressing the challenges related to the agents' privacy and performance. In particular, we show that the use of novelty based techniques can significantly reduce the number of messages transmitted among agents, better preserving their privacy and improving their performance. An experimental study analyses the effectiveness of our techniques and compares them with the state-of-the-art. Finally, we evaluate the robustness of our approach, considering different delays in the transmission of messages as they would occur in overloaded networks, due for example to massive attacks or critical situations.
Best-First Width Search for Multi Agent Privacy-preserving Planning
Jun 10, 2019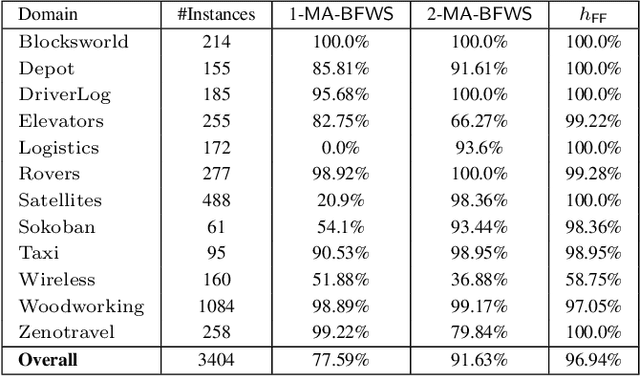
In multi-agent planning, preserving the agents' privacy has become an increasingly popular research topic. For preserving the agents' privacy, agents jointly compute a plan that achieves mutual goals by keeping certain information private to the individual agents. Unfortunately, this can severely restrict the accuracy of the heuristic functions used while searching for solutions. It has been recently shown that, for centralized planning, the performance of goal oriented search can be improved by combining goal oriented search and width-based search. The combination of these techniques has been called best-first width search. In this paper, we investigate the usage of best-first width search in the context of (decentralised) multi-agent privacy-preserving planning, addressing the challenges related to the agents' privacy and performance. In particular, we show that best-first width search is a very effective approach over several benchmark domains, even when the search is driven by heuristics that roughly estimate the distance from goal states, computed without using the private information of other agents. An experimental study analyses the effectiveness of our techniques and compares them with the state-of-the-art.