 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Learning Object Properties
Paper and Code
Jan 15, 2023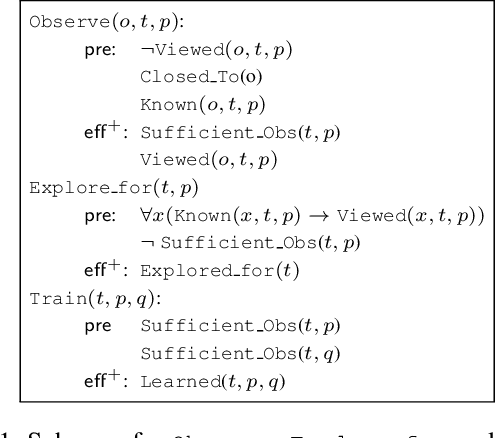
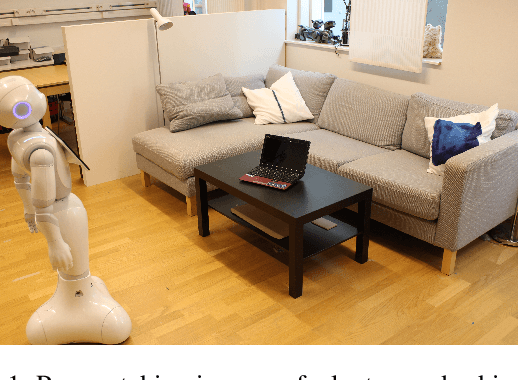
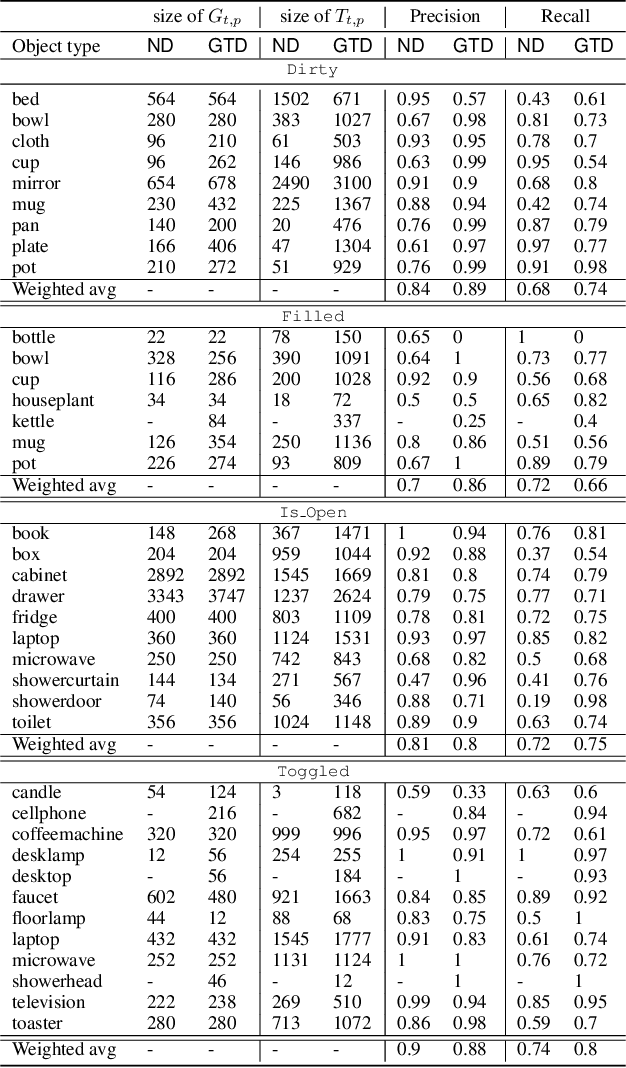
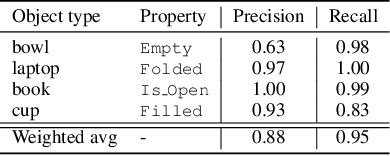
Autonomous agents embedded in a physical environment need the ability to recognize objects and their properties from sensory data. Such a perceptual ability is often implemented by supervised machine learning models, which are pre-trained using a set of labelled data. In real-world, open-ended deployments, however, it is unrealistic to assume to have a pre-trained model for all possible environments. Therefore, agents need to dynamically learn/adapt/extend their perceptual abilities online, in an autonomous way, by exploring and interacting with the environment where they operate. This paper describes a way to do so, by exploiting symbolic planning. Specifically, we formalize the problem of automatically training a neural network to recognize object properties as a symbolic planning problem (using PDDL). We use planning techniques to produce a strategy for automating the training dataset creation and the learning process. Finally, we provide an experimental evaluation in both a simulated and a real environment, which shows that the proposed approach is able to successfully learn how to recognize new object properties.