 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Learning Object Properties
Jan 15, 2023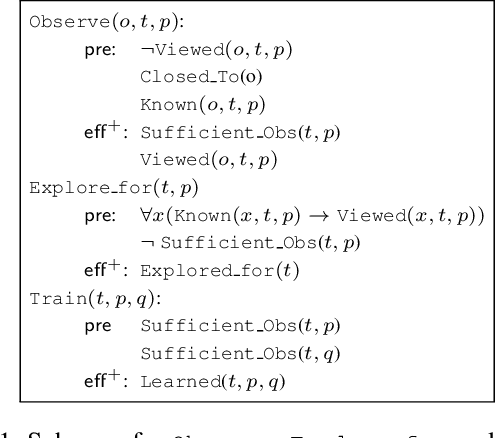
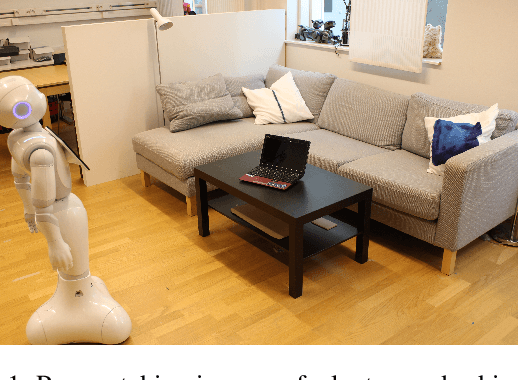
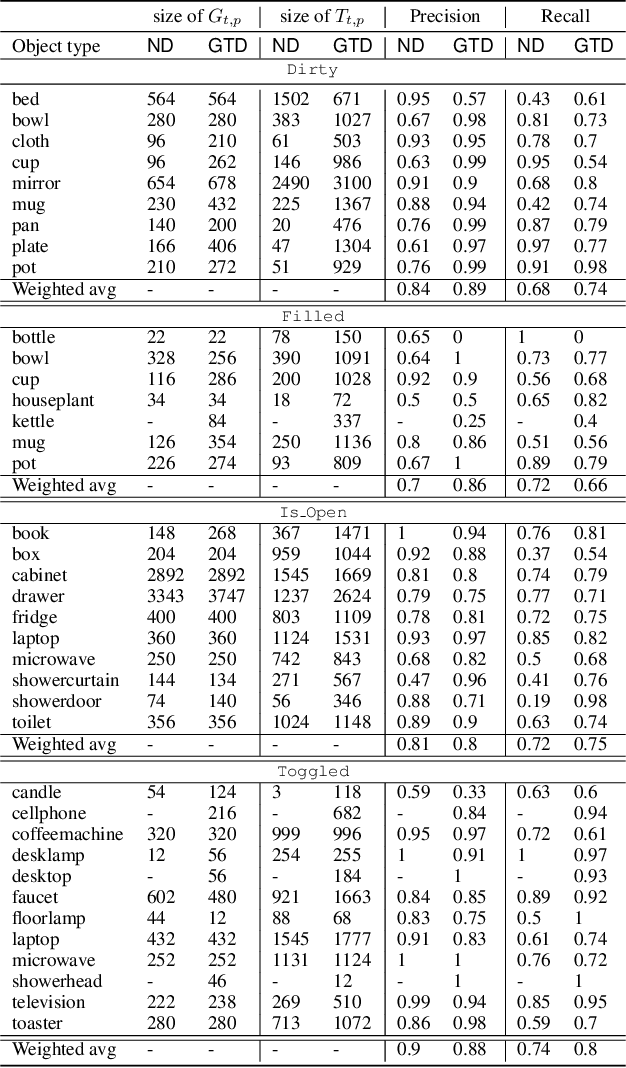
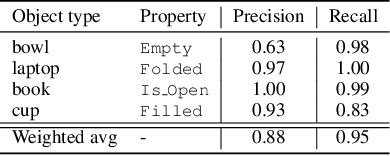
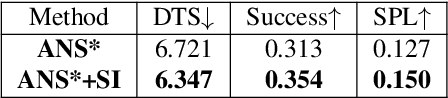
Autonomous agents embedded in a physical environment need the ability to recognize objects and their properties from sensory data. Such a perceptual ability is often implemented by supervised machine learning models, which are pre-trained using a set of labelled data. In real-world, open-ended deployments, however, it is unrealistic to assume to have a pre-trained model for all possible environments. Therefore, agents need to dynamically learn/adapt/extend their perceptual abilities online, in an autonomous way, by exploring and interacting with the environment where they operate. This paper describes a way to do so, by exploiting symbolic planning. Specifically, we formalize the problem of automatically training a neural network to recognize object properties as a symbolic planning problem (using PDDL). We use planning techniques to produce a strategy for automating the training dataset creation and the learning process. Finally, we provide an experimental evaluation in both a simulated and a real environment, which shows that the proposed approach is able to successfully learn how to recognize new object properties.
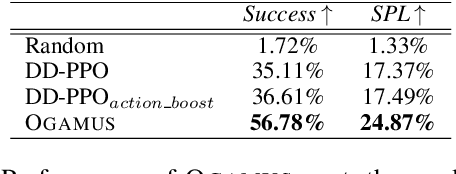
Online Learning of Reusable Abstract Models for Object Goal Navigation
Mar 04, 2022


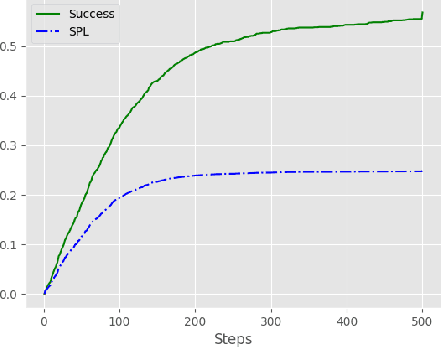
In this paper, we present a novel approach to incrementally learn an Abstract Model of an unknown environment, and show how an agent can reuse the learned model for tackling the Object Goal Navigation task. The Abstract Model is a finite state machine in which each state is an abstraction of a state of the environment, as perceived by the agent in a certain position and orientation. The perceptions are high-dimensional sensory data (e.g., RGB-D images), and the abstraction is reached by exploiting image segmentation and the Taskonomy model bank. The learning of the Abstract Model is accomplished by executing actions, observing the reached state, and updating the Abstract Model with the acquired information. The learned models are memorized by the agent, and they are reused whenever it recognizes to be in an environment that corresponds to the stored model. We investigate the effectiveness of the proposed approach for the Object Goal Navigation task, relying on public benchmarks. Our results show that the reuse of learned Abstract Models can boost performance on Object Goal Navigation.
Online Grounding of PDDL Domains by Acting and Sensing in Unknown Environments
Dec 18, 2021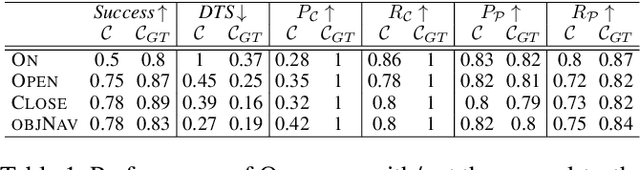
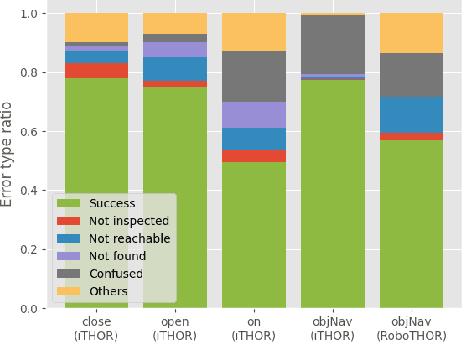
To effectively use an abstract (PDDL) planning domain to achieve goals in an unknown environment, an agent must instantiate such a domain with the objects of the environment and their properties. If the agent has an egocentric and partial view of the environment, it needs to act, sense, and abstract the perceived data in the planning domain. Furthermore, the agent needs to compile the plans computed by a symbolic planner into low level actions executable by its actuators. This paper proposes a framework that aims to accomplish the aforementioned perspective and allows an agent to perform different tasks. For this purpose, we integrate machine learning models to abstract the sensory data, symbolic planning for goal achievement and path planning for navigation. We evaluate the proposed method in accurate simulated environments, where the sensors are RGB-D on-board camera, GPS and compass.