 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenSHC: A Versatile Multilegged Robot Controller
Jun 09, 2020
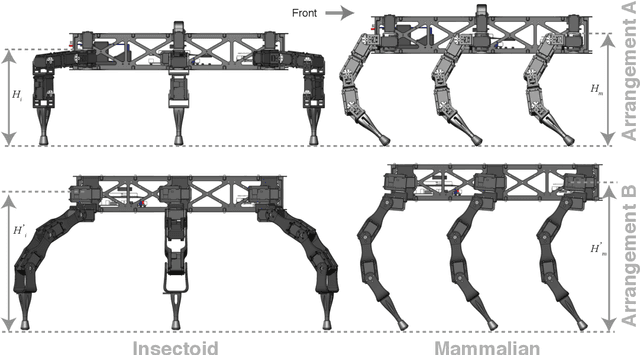

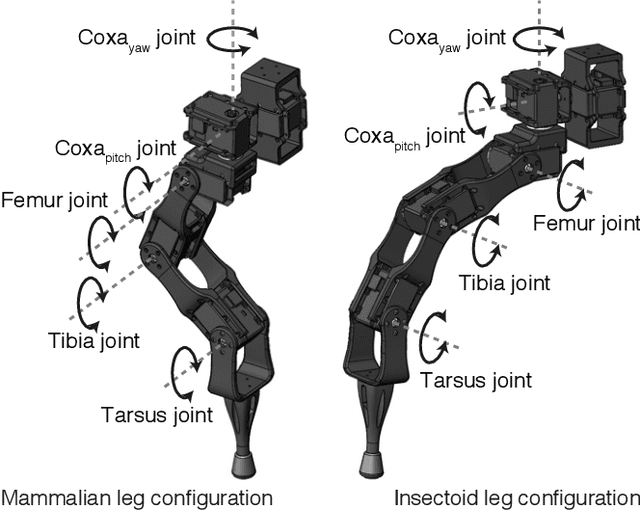
Multilegged robots have the ability to perform stable locomotion on relatively rough terrain. However, the complexity of legged robots over wheeled or tracked robots make them difficult to control. This paper presents OpenSHC (Open-source Syropod High-level Controller), a versatile high-level controller capable of generating gaits for quasi-static multilegged robots. With the Robot Operating System (ROS) integration, the controller can be quickly deployed on robots with different actuators and sensor payloads. The flexibility of OpenSHC is demonstrated on the 30 degrees of freedom hexapod Bullet, analysing the energetic performance of various leg configurations, kinematics arrangements and gaits over different locomotion speeds. With OpenSHC being easily configured to different physical and locomotion specifications, a hardware-based parameter space search for optimal locomotion parameters is conducted. The experimental evaluation shows that the mammalian configuration offers lower power consumption across a range of step frequencies; with the insectoid configuration providing performance advantages at higher body velocities and increased stability at low step frequencies. OpenSHC is open-source and able to be configured for various number of joints and legs.
Non-Linearity Measure for POMDP-based Motion Planning
May 29, 2020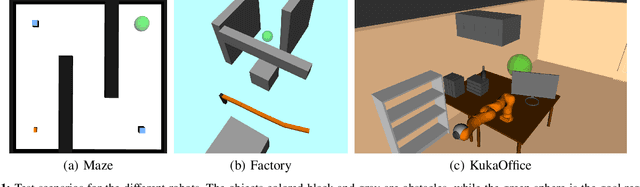
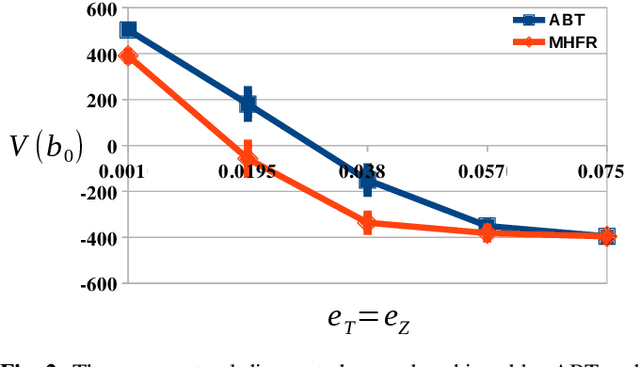
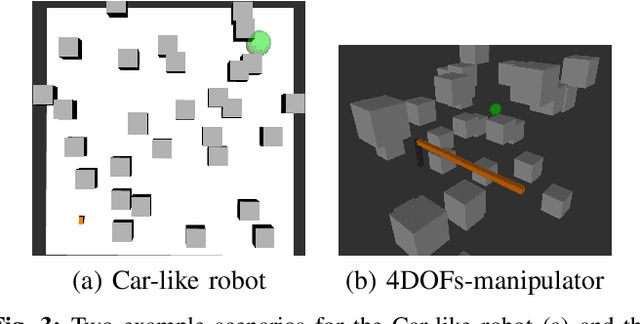

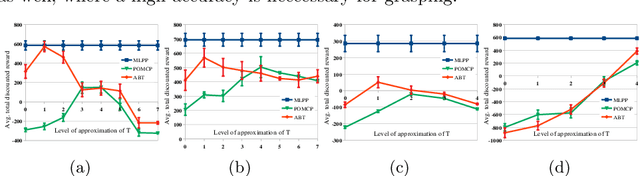
Motion planning under uncertainty is essential for reliable robot operation. Despite substantial advances over the past decade, the problem remains difficult for systems with complex dynamics. Most state-of-the-art methods perform search that relies on a large number of forward simulations. For systems with complex dynamics, this generally require costly numerical integrations which significantly slows down the planning process. Linearization-based methods have been proposed that can alleviate the above problem. However, it is not clear how linearization affects the quality of the generated motion strategy, and when such simplifications are admissible. We propose a non-linearity measure, called Statistical-distance-based Non-linearity Measure (SNM), that can identify where linearization is beneficial and where it should be avoided. We show that when the problem is framed as the Partially Observable Markov Decision Process, the value difference between the optimal strategy for the original model and the linearized model can be upper bounded by a function linear in SNM. Comparisons with an existing measure on various scenarios indicate that SNM is more suitable in estimating the effectiveness of linearization-based solvers. To test the applicability of SNM in motion planning, we propose a simple on-line planner that uses SNM as a heuristic to switch between a general and a linearization-based solver. Results on a car-like robot with second order dynamics and 4-DOFs and 7-DOFs torque-controlled manipulators indicate that SNM can appropriately decide if and when a linearization-based solver should be used.
Multilevel Monte-Carlo for Solving POMDPs Online
Jul 23, 2019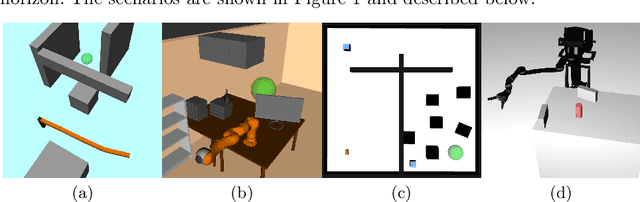
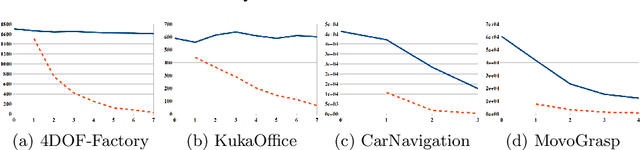
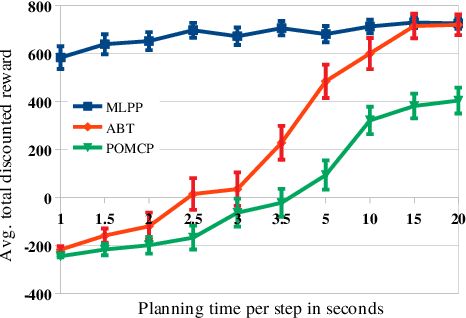
Planning under partial obervability is essential for autonomous robots. A principled way to address such planning problems is the Partially Observable Markov Decision Process (POMDP). Although solving POMDPs is computationally intractable, substantial advancements have been achieved in developing approximate POMDP solvers in the past two decades. However, computing robust solutions for systems with complex dynamics remain challenging. Most on-line solvers rely on a large number of forward-simulations and standard Monte-Carlo methods to compute the expected outcomes of actions the robot can perform. For systems with complex dynamics, e.g., those with non-linear dynamics that admit no closed form solution, even a single forward simulation can be prohibitively expensive. Of course, this issue exacerbates for problems with long planning horizons. This paper aims to alleviate the above difficulty. To this end, we propose a new on-line POMDP solver, called Multilevel POMDP Planner (MLPP), that combines the commonly known Monte-Carlo-Tree-Search with the concept of Multilevel Monte-Carlo to speed-up our capability in generating approximately optimal solutions for POMDPs with complex dynamics. Experiments on four different problems of POMDP-based torque control, navigation and grasping indicate that MLPP substantially outperforms state-of-the-art POMDP solvers.
A Staged Approach to Evolving Real-world UAV Controllers
May 26, 2019
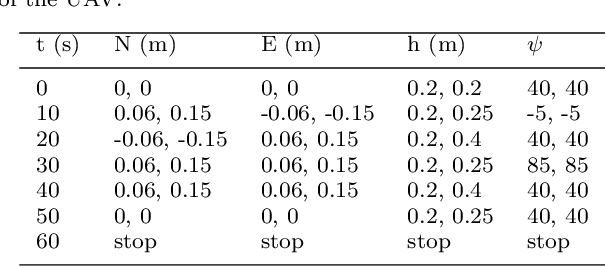

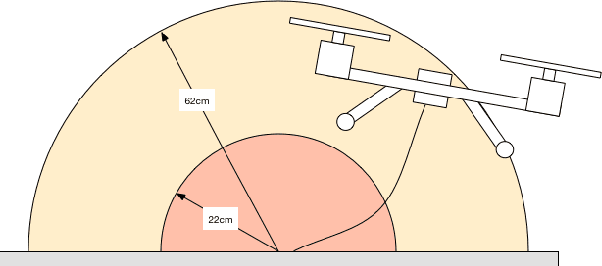
A testbed has recently been introduced that evolves controllers for arbitrary hover-capable UAVs, with evaluations occurring directly on the robot. To prepare the testbed for real-world deployment, we investigate the effects of state-space limitations brought about by physical tethering (which prevents damage to the UAV during stochastic tuning), on the generality of the evolved controllers. We identify generalisation issues in some controllers, and propose an improved method that comprises two stages: in the first stage, controllers are evolved as normal using standard tethers, but experiments are terminated when the population displays basic flight competency. Optimisation then continues on a much less restrictive tether, effectively free-flying, and is allowed to explore a larger state-space envelope. We compare the two methods on a hover task using a real UAV, and show that more general solutions are generated in fewer generations using the two-stage approach. A secondary experiment undertakes a sensitivity analysis of the evolved controllers.
Elastic LiDAR Fusion: Dense Map-Centric Continuous-Time SLAM
Mar 05, 2018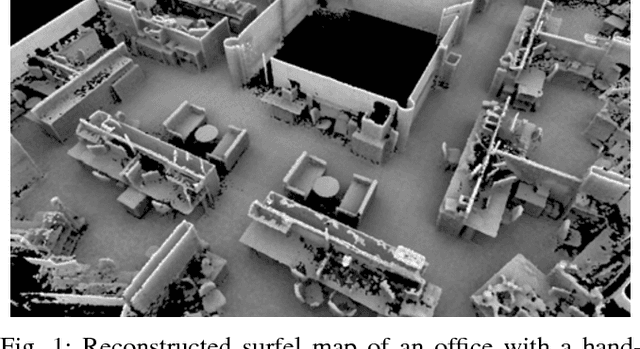
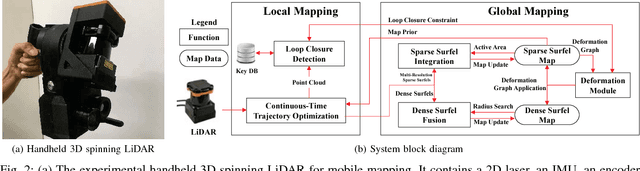
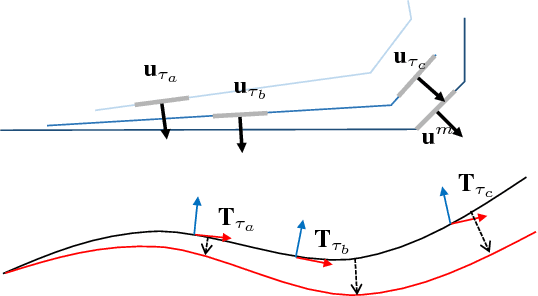
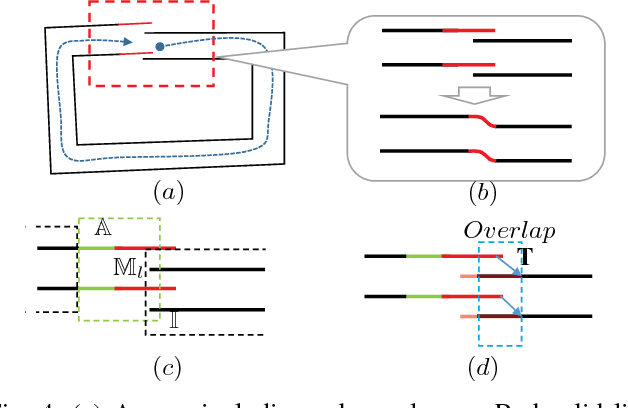
The concept of continuous-time trajectory representation has brought increased accuracy and efficiency to multi-modal sensor fusion in modern SLAM. However, regardless of these advantages, its offline property caused by the requirement of global batch optimization is critically hindering its relevance for real-time and life-long applications. In this paper, we present a dense map-centric SLAM method based on a continuous-time trajectory to cope with this problem. The proposed system locally functions in a similar fashion to conventional Continuous-Time SLAM (CT-SLAM). However, it removes the need for global trajectory optimization by introducing map deformation. The computational complexity of the proposed approach for loop closure does not depend on the operation time, but only on the size of the space it explored before the loop closure. It is therefore more suitable for long term operation compared to the conventional CT-SLAM. Furthermore, the proposed method reduces uncertainty in the reconstructed dense map by using probabilistic surface element (surfel) fusion. We demonstrate that the proposed method produces globally consistent maps without global batch trajectory optimization, and effectively reduces LiDAR noise by surfel fusion.
Autonomous surveillance for biosecurity
Mar 04, 2015The global movement of people and goods has increased the risk of biosecurity threats and their potential to incur large economic, social, and environmental costs. Conventional manual biosecurity surveillance methods are limited by their scalability in space and time. This article focuses on autonomous surveillance systems, comprising sensor networks, robots, and intelligent algorithms, and their applicability to biosecurity threats. We discuss the spatial and temporal attributes of autonomous surveillance technologies and map them to three broad categories of biosecurity threat: (i) vector-borne diseases; (ii) plant pests; and (iii) aquatic pests. Our discussion reveals a broad range of opportunities to serve biosecurity needs through autonomous surveillance.