 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Staged Approach to Evolving Real-world UAV Controllers
May 26, 2019
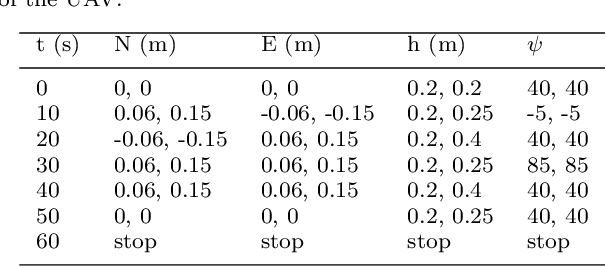

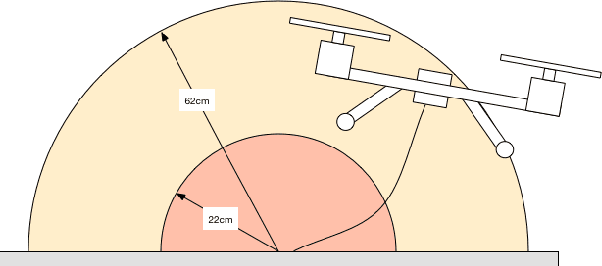
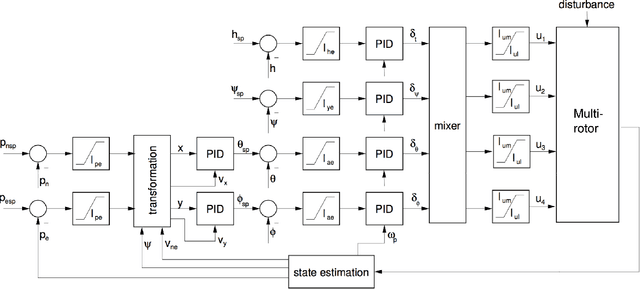
A testbed has recently been introduced that evolves controllers for arbitrary hover-capable UAVs, with evaluations occurring directly on the robot. To prepare the testbed for real-world deployment, we investigate the effects of state-space limitations brought about by physical tethering (which prevents damage to the UAV during stochastic tuning), on the generality of the evolved controllers. We identify generalisation issues in some controllers, and propose an improved method that comprises two stages: in the first stage, controllers are evolved as normal using standard tethers, but experiments are terminated when the population displays basic flight competency. Optimisation then continues on a much less restrictive tether, effectively free-flying, and is allowed to explore a larger state-space envelope. We compare the two methods on a hover task using a real UAV, and show that more general solutions are generated in fewer generations using the two-stage approach. A secondary experiment undertakes a sensitivity analysis of the evolved controllers.
On Self-Adaptive Mutation Restarts for Evolutionary Robotics with Real Rotorcraft
Apr 03, 2017
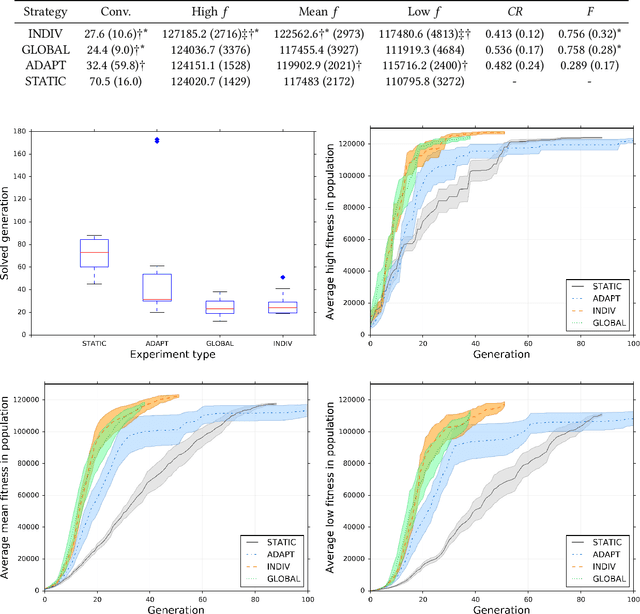

Self-adaptive parameters are increasingly used in the field of Evolutionary Robotics, as they allow key evolutionary rates to vary autonomously in a context-sensitive manner throughout the optimisation process. A significant limitation to self-adaptive mutation is that rates can be set unfavourably, which hinders convergence. Rate restarts are typically employed to remedy this, but thus far have only been applied in Evolutionary Robotics for mutation-only algorithms. This paper focuses on the level at which evolutionary rate restarts are applied in population-based algorithms with more than 1 evolutionary operator. After testing on a real hexacopter hovering task, we conclude that individual-level restarting results in higher fitness solutions without fitness stagnation, and population restarts provide a more stable rate evolution. Without restarts, experiments can become stuck in suboptimal controller/rate combinations which can be difficult to escape from.
Evolving Spiking Networks with Variable Resistive Memories
May 17, 2015Neuromorphic computing is a brainlike information processing paradigm that requires adaptive learning mechanisms. A spiking neuro-evolutionary system is used for this purpose; plastic resistive memories are implemented as synapses in spiking neural networks. The evolutionary design process exploits parameter self-adaptation and allows the topology and synaptic weights to be evolved for each network in an autonomous manner. Variable resistive memories are the focus of this research; each synapse has its own conductance profile which modifies the plastic behaviour of the device and may be altered during evolution. These variable resistive networks are evaluated on a noisy robotic dynamic-reward scenario against two static resistive memories and a system containing standard connections only. Results indicate that the extra behavioural degrees of freedom available to the networks incorporating variable resistive memories enable them to outperform the comparative synapse types.
* 27 pages