 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on the Integration of Generative AI for Critical Thinking in Mobile Networks
Apr 10, 2024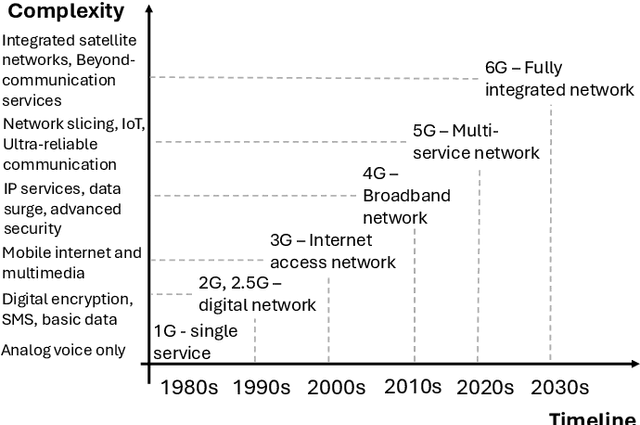
In the near future, mobile networks are expected to broaden their services and coverage to accommodate a larger user base and diverse user needs. Thus, they will increasingly rely on artificial intelligence (AI) to manage network operation and control costs, undertaking complex decision-making roles. This shift will necessitate the application of techniques that incorporate critical thinking abilities, including reasoning and planning. Symbolic AI techniques already facilitate critical thinking based on existing knowledge. Yet, their use in telecommunications is hindered by the high cost of mostly manual curation of this knowledge and high computational complexity of reasoning tasks. At the same time, there is a spurt of innovations in industries such as telecommunications due to Generative AI (GenAI) technologies, operating independently of human-curated knowledge. However, their capacity for critical thinking remains uncertain. This paper aims to address this gap by examining the current status of GenAI algorithms with critical thinking capabilities and investigating their potential applications in telecom networks. Specifically, the aim of this study is to offer an introduction to the potential utilization of GenAI for critical thinking techniques in mobile networks, while also establishing a foundation for future research.
Enabling human-like task identification from natural conversation
Aug 29, 2020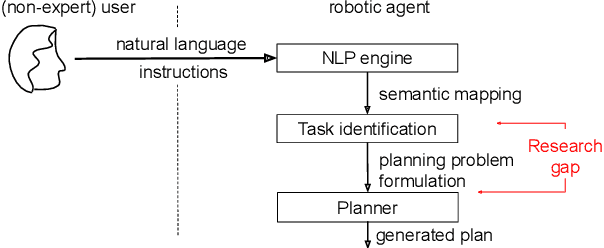
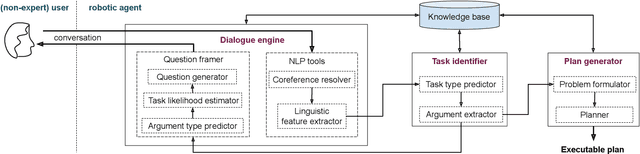
A robot as a coworker or a cohabitant is becoming mainstream day-by-day with the development of low-cost sophisticated hardware. However, an accompanying software stack that can aid the usability of the robotic hardware remains the bottleneck of the process, especially if the robot is not dedicated to a single job. Programming a multi-purpose robot requires an on the fly mission scheduling capability that involves task identification and plan generation. The problem dimension increases if the robot accepts tasks from a human in natural language. Though recent advances in NLP and planner development can solve a variety of complex problems, their amalgamation for a dynamic robotic task handler is used in a limited scope. Specifically, the problem of formulating a planning problem from natural language instructions is not studied in details. In this work, we provide a non-trivial method to combine an NLP engine and a planner such that a robot can successfully identify tasks and all the relevant parameters and generate an accurate plan for the task. Additionally, some mechanism is required to resolve the ambiguity or missing pieces of information in natural language instruction. Thus, we also develop a dialogue strategy that aims to gather additional information with minimal question-answer iterations and only when it is necessary. This work makes a significant stride towards enabling a human-like task understanding capability in a robot.