 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Learning: A Tutorial
Oct 14, 2025


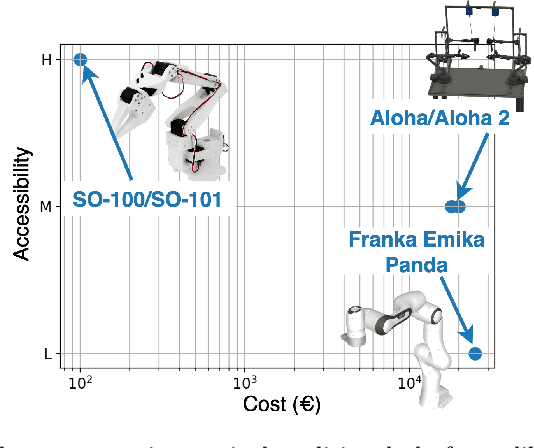
Robot learning is at an inflection point, driven by rapid advancements in machine learning and the growing availability of large-scale robotics data. This shift from classical, model-based methods to data-driven, learning-based paradigms is unlocking unprecedented capabilities in autonomous systems. This tutorial navigates the landscape of modern robot learning, charting a course from the foundational principles of Reinforcement Learning and Behavioral Cloning to generalist, language-conditioned models capable of operating across diverse tasks and even robot embodiments. This work is intended as a guide for researchers and practitioners, and our goal is to equip the reader with the conceptual understanding and practical tools necessary to contribute to developments in robot learning, with ready-to-use examples implemented in $\texttt{lerobot}$.
Solving robust MDPs as a sequence of static RL problems
Oct 08, 2024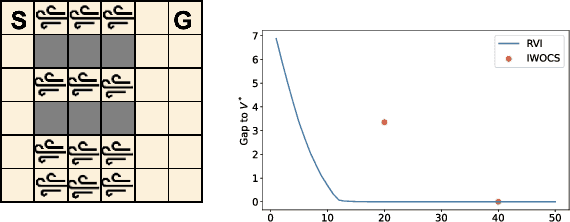
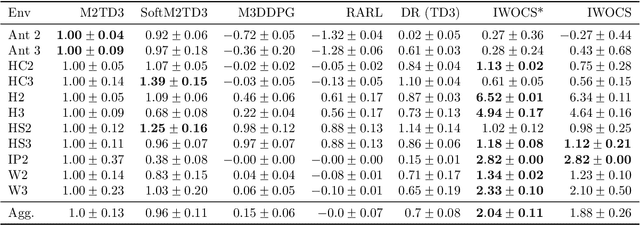
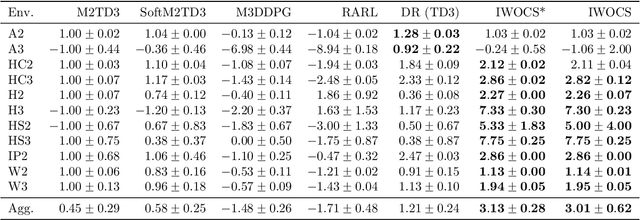
Designing control policies whose performance level is guaranteed to remain above a given threshold in a span of environments is a critical feature for the adoption of reinforcement learning (RL) in real-world applications. The search for such robust policies is a notoriously difficult problem, related to the so-called dynamic model of transition function uncertainty, where the environment dynamics are allowed to change at each time step. But in practical cases, one is rather interested in robustness to a span of static transition models throughout interaction episodes. The static model is known to be harder to solve than the dynamic one, and seminal algorithms, such as robust value iteration, as well as most recent works on deep robust RL, build upon the dynamic model. In this work, we propose to revisit the static model. We suggest an analysis of why solving the static model under some mild hypotheses is a reasonable endeavor, based on an equivalence with the dynamic model, and formalize the general intuition that robust MDPs can be solved by tackling a series of static problems. We introduce a generic meta-algorithm called IWOCS, which incrementally identifies worst-case transition models so as to guide the search for a robust policy. Discussion on IWOCS sheds light on new ways to decouple policy optimization and adversarial transition functions and opens new perspectives for analysis. We derive a deep RL version of IWOCS and demonstrate it is competitive with state-of-the-art algorithms on classical benchmarks.
Time-Constrained Robust MDPs
Jun 12, 2024Robust reinforcement learning is essential for deploying reinforcement learning algorithms in real-world scenarios where environmental uncertainty predominates. Traditional robust reinforcement learning often depends on rectangularity assumptions, where adverse probability measures of outcome states are assumed to be independent across different states and actions. This assumption, rarely fulfilled in practice, leads to overly conservative policies. To address this problem, we introduce a new time-constrained robust MDP (TC-RMDP) formulation that considers multifactorial, correlated, and time-dependent disturbances, thus more accurately reflecting real-world dynamics. This formulation goes beyond the conventional rectangularity paradigm, offering new perspectives and expanding the analytical framework for robust RL. We propose three distinct algorithms, each using varying levels of environmental information, and evaluate them extensively on continuous control benchmarks. Our results demonstrate that these algorithms yield an efficient tradeoff between performance and robustness, outperforming traditional deep robust RL methods in time-constrained environments while preserving robustness in classical benchmarks. This study revisits the prevailing assumptions in robust RL and opens new avenues for developing more practical and realistic RL applications.
RRLS : Robust Reinforcement Learning Suite
Jun 12, 2024Robust reinforcement learning is the problem of learning control policies that provide optimal worst-case performance against a span of adversarial environments. It is a crucial ingredient for deploying algorithms in real-world scenarios with prevalent environmental uncertainties and has been a long-standing object of attention in the community, without a standardized set of benchmarks. This contribution endeavors to fill this gap. We introduce the Robust Reinforcement Learning Suite (RRLS), a benchmark suite based on Mujoco environments. RRLS provides six continuous control tasks with two types of uncertainty sets for training and evaluation. Our benchmark aims to standardize robust reinforcement learning tasks, facilitating reproducible and comparable experiments, in particular those from recent state-of-the-art contributions, for which we demonstrate the use of RRLS. It is also designed to be easily expandable to new environments. The source code is available at \href{https://github.com/SuReLI/RRLS}{https://github.com/SuReLI/RRLS}.
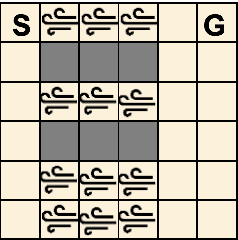
Look where you look! Saliency-guided Q-networks for visual RL tasks
Sep 29, 2022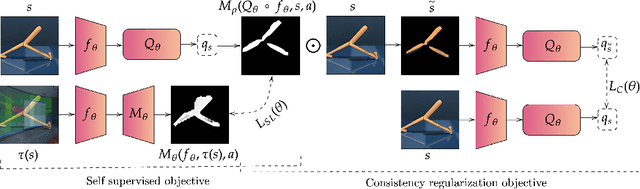
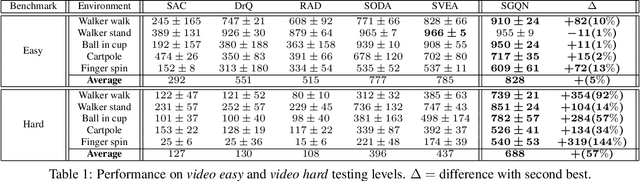

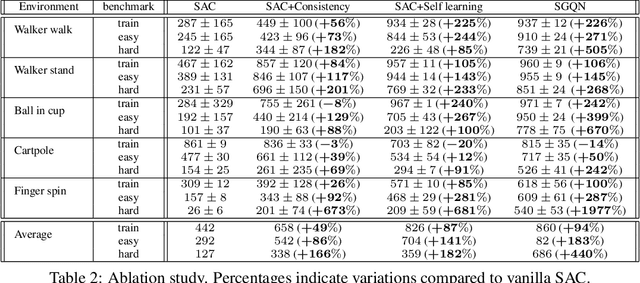
Deep reinforcement learning policies, despite their outstanding efficiency in simulated visual control tasks, have shown disappointing ability to generalize across disturbances in the input training images. Changes in image statistics or distracting background elements are pitfalls that prevent generalization and real-world applicability of such control policies. We elaborate on the intuition that a good visual policy should be able to identify which pixels are important for its decision, and preserve this identification of important sources of information across images. This implies that training of a policy with small generalization gap should focus on such important pixels and ignore the others. This leads to the introduction of saliency-guided Q-networks (SGQN), a generic method for visual reinforcement learning, that is compatible with any value function learning method. SGQN vastly improves the generalization capability of Soft Actor-Critic agents and outperforms existing stateof-the-art methods on the Deepmind Control Generalization benchmark, setting a new reference in terms of training efficiency, generalization gap, and policy interpretability.
River: machine learning for streaming data in Python
Dec 08, 2020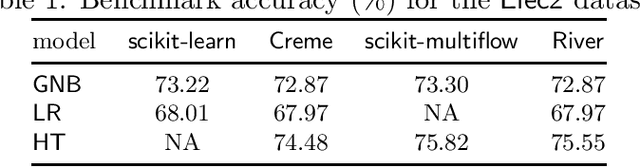

River is a machine learning library for dynamic data streams and continual learning. It provides multiple state-of-the-art learning methods, data generators/transformers, performance metrics and evaluators for different stream learning problems. It is the result from the merger of the two most popular packages for stream learning in Python: Creme and scikit-multiflow. River introduces a revamped architecture based on the lessons learnt from the seminal packages. River's ambition is to be the go-to library for doing machine learning on streaming data. Additionally, this open source package brings under the same umbrella a large community of practitioners and researchers. The source code is available at https://github.com/online-ml/river.