 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Multi-Hardware Mobile Models via Architecture Search
Aug 18, 2020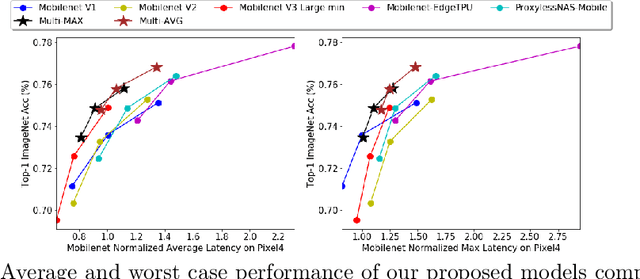

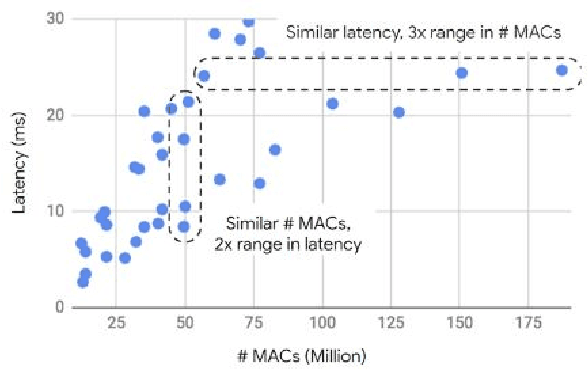
Developing efficient models for mobile phones or other on-device deployments has been a popular topic in both industry and academia. In such scenarios, it is often convenient to deploy the same model on a diverse set of hardware devices owned by different end users to minimize the costs of development, deployment and maintenance. Despite the importance, designing a single neural network that can perform well on multiple devices is difficult as each device has its own specialty and restrictions: A model optimized for one device may not perform well on another. While most existing work proposes different models optimized for each single hardware, this paper is the first which explores the problem of finding a single model that performs well on multiple hardware. Specifically, we leverage architecture search to help us find the best model, where given a set of diverse hardware to optimize for, we first introduce a multi-hardware search space that is compatible with all examined hardware. Then, to measure the performance of a neural network over multiple hardware, we propose metrics that can characterize the overall latency performance in an average case and worst case scenario. With the multi-hardware search space and new metrics applied to Pixel4 CPU, GPU, DSP and EdgeTPU, we found models that perform on par or better than state-of-the-art (SOTA) models on each of our target accelerators and generalize well on many un-targeted hardware. Comparing with single-hardware searches, multi-hardware search gives a better trade-off between computation cost and model performance.
Low-Power Computer Vision: Status, Challenges, Opportunities
Apr 15, 2019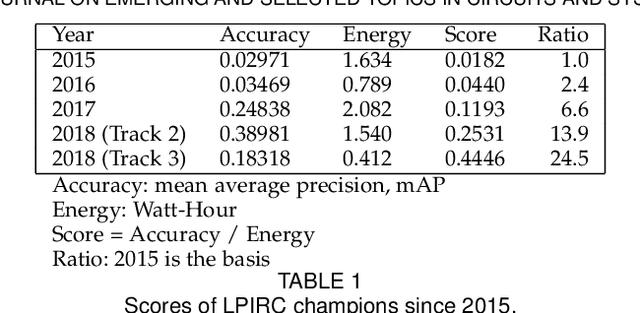
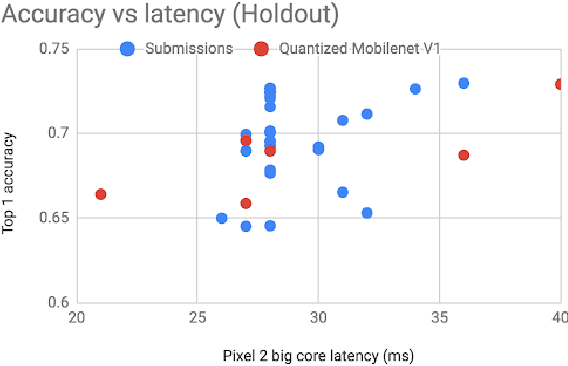
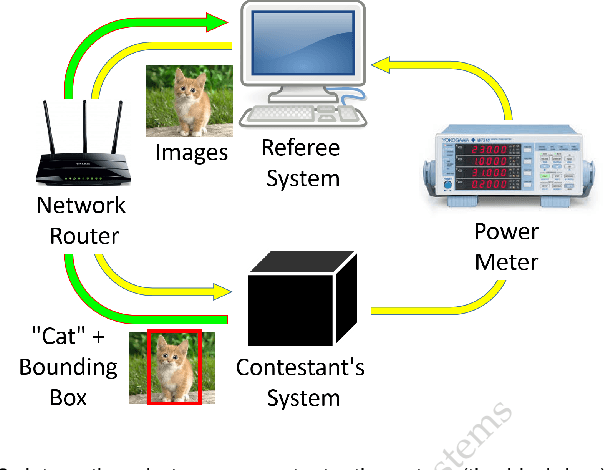
Computer vision has achieved impressive progress in recent years. Meanwhile, mobile phones have become the primary computing platforms for millions of people. In addition to mobile phones, many autonomous systems rely on visual data for making decisions and some of these systems have limited energy (such as unmanned aerial vehicles also called drones and mobile robots). These systems rely on batteries and energy efficiency is critical. This article serves two main purposes: (1) Examine the state-of-the-art for low-power solutions to detect objects in images. Since 2015, the IEEE Annual International Low-Power Image Recognition Challenge (LPIRC) has been held to identify the most energy-efficient computer vision solutions. This article summarizes 2018 winners' solutions. (2) Suggest directions for research as well as opportunities for low-power computer vision.
2018 Low-Power Image Recognition Challenge
Oct 03, 2018The Low-Power Image Recognition Challenge (LPIRC, https://rebootingcomputing.ieee.org/lpirc) is an annual competition started in 2015. The competition identifies the best technologies that can classify and detect objects in images efficiently (short execution time and low energy consumption) and accurately (high precision). Over the four years, the winners' scores have improved more than 24 times. As computer vision is widely used in many battery-powered systems (such as drones and mobile phones), the need for low-power computer vision will become increasingly important. This paper summarizes LPIRC 2018 by describing the three different tracks and the winners' solutions.