 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning Within the Classical Robotics Stack: A Case Study in Robot Soccer
Dec 12, 2024



Robot decision-making in partially observable, real-time, dynamic, and multi-agent environments remains a difficult and unsolved challenge. Model-free reinforcement learning (RL) is a promising approach to learning decision-making in such domains, however, end-to-end RL in complex environments is often intractable. To address this challenge in the RoboCup Standard Platform League (SPL) domain, we developed a novel architecture integrating RL within a classical robotics stack, while employing a multi-fidelity sim2real approach and decomposing behavior into learned sub-behaviors with heuristic selection. Our architecture led to victory in the 2024 RoboCup SPL Challenge Shield Division. In this work, we fully describe our system's architecture and empirically analyze key design decisions that contributed to its success. Our approach demonstrates how RL-based behaviors can be integrated into complete robot behavior architectures.
Reinforcement Learning via Auxiliary Task Distillation
Jun 24, 2024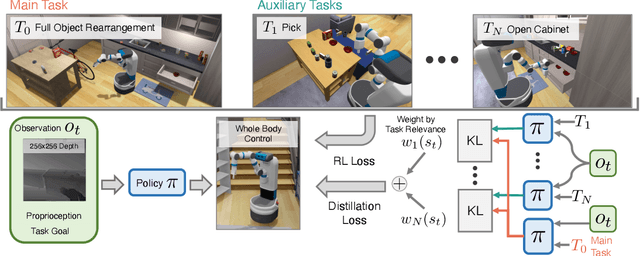
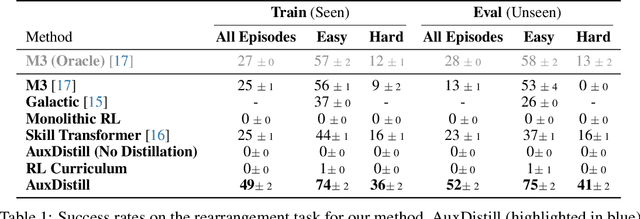
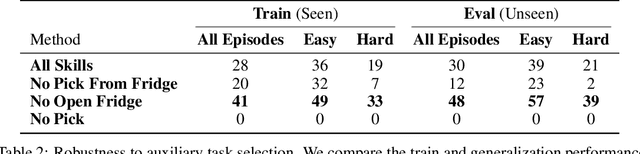
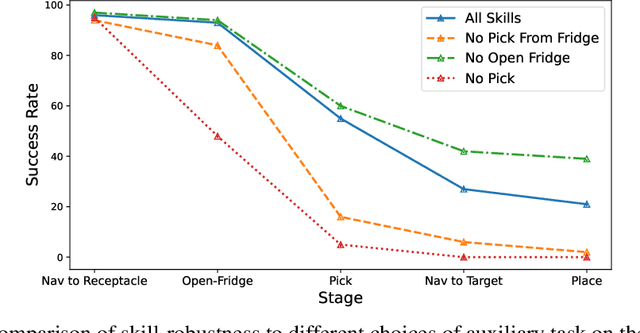
We present Reinforcement Learning via Auxiliary Task Distillation (AuxDistill), a new method that enables reinforcement learning (RL) to perform long-horizon robot control problems by distilling behaviors from auxiliary RL tasks. AuxDistill achieves this by concurrently carrying out multi-task RL with auxiliary tasks, which are easier to learn and relevant to the main task. A weighted distillation loss transfers behaviors from these auxiliary tasks to solve the main task. We demonstrate that AuxDistill can learn a pixels-to-actions policy for a challenging multi-stage embodied object rearrangement task from the environment reward without demonstrations, a learning curriculum, or pre-trained skills. AuxDistill achieves $2.3 \times$ higher success than the previous state-of-the-art baseline in the Habitat Object Rearrangement benchmark and outperforms methods that use pre-trained skills and expert demonstrations.
A Graph Neural Network Approach for Temporal Mesh Blending and Correspondence
Jun 23, 2023



We have proposed a self-supervised deep learning framework for solving the mesh blending problem in scenarios where the meshes are not in correspondence. To solve this problem, we have developed Red-Blue MPNN, a novel graph neural network that processes an augmented graph to estimate the correspondence. We have designed a novel conditional refinement scheme to find the exact correspondence when certain conditions are satisfied. We further develop a graph neural network that takes the aligned meshes and the time value as input and fuses this information to process further and generate the desired result. Using motion capture datasets and human mesh designing software, we create a large-scale synthetic dataset consisting of temporal sequences of human meshes in motion. Our results demonstrate that our approach generates realistic deformation of body parts given complex inputs.
RGL-NET: A Recurrent Graph Learning framework for Progressive Part Assembly
Jul 30, 2021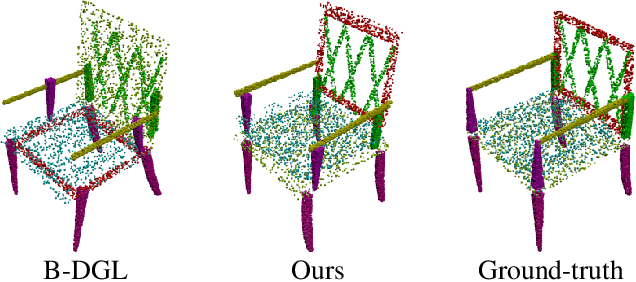
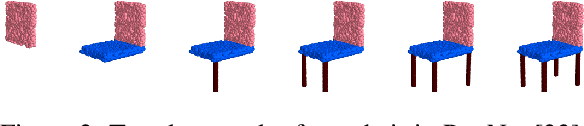
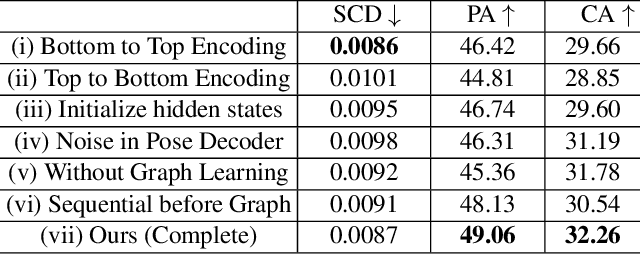
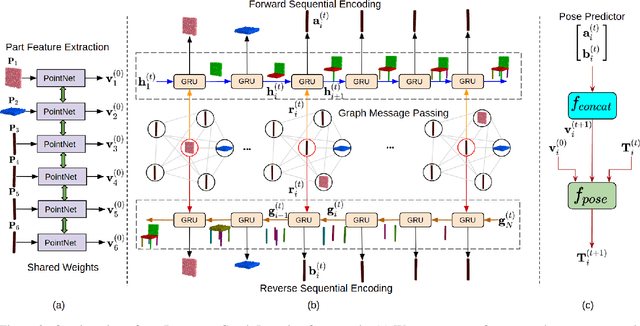
Autonomous assembly of objects is an essential task in robotics and 3D computer vision. It has been studied extensively in robotics as a problem of motion planning, actuator control and obstacle avoidance. However, the task of developing a generalized framework for assembly robust to structural variants remains relatively unexplored. In this work, we tackle this problem using a recurrent graph learning framework considering inter-part relations and the progressive update of the part pose. Our network can learn more plausible predictions of shape structure by accounting for priorly assembled parts. Compared to the current state-of-the-art, our network yields up to 10% improvement in part accuracy and up to 15% improvement in connectivity accuracy on the PartNet dataset. Moreover, our resulting latent space facilitates exciting applications such as shape recovery from the point-cloud components. We conduct extensive experiments to justify our design choices and demonstrate the effectiveness of the proposed framework.