 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$\textbf{EMOS}$: $\textbf{E}$mbodiment-aware Heterogeneous $\textbf{M}$ulti-robot $\textbf{O}$perating $\textbf{S}$ystem with LLM Agents
Paper and Code


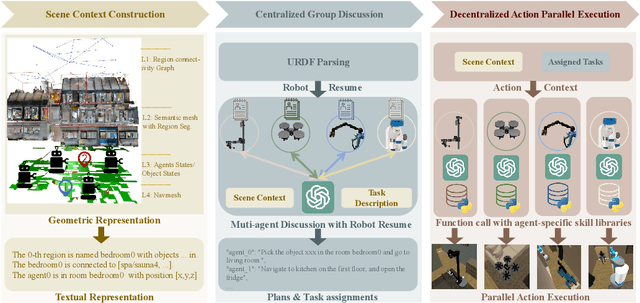

Heterogeneous multi-robot systems (HMRS) have emerged as a powerful approach for tackling complex tasks that single robots cannot manage alone. Current large-language-model-based multi-agent systems (LLM-based MAS) have shown success in areas like software development and operating systems, but applying these systems to robot control presents unique challenges. In particular, the capabilities of each agent in a multi-robot system are inherently tied to the physical composition of the robots, rather than predefined roles. To address this issue, we introduce a novel multi-agent framework designed to enable effective collaboration among heterogeneous robots with varying embodiments and capabilities, along with a new benchmark named Habitat-MAS. One of our key designs is $\textit{Robot Resume}$: Instead of adopting human-designed role play, we propose a self-prompted approach, where agents comprehend robot URDF files and call robot kinematics tools to generate descriptions of their physics capabilities to guide their behavior in task planning and action execution. The Habitat-MAS benchmark is designed to assess how a multi-agent framework handles tasks that require embodiment-aware reasoning, which includes 1) manipulation, 2) perception, 3) navigation, and 4) comprehensive multi-floor object rearrangement. The experimental results indicate that the robot's resume and the hierarchical design of our multi-agent system are essential for the effective operation of the heterogeneous multi-robot system within this intricate problem context.