Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTartanAir: A Dataset to Push the Limits of Visual SLAM
Paper and Code
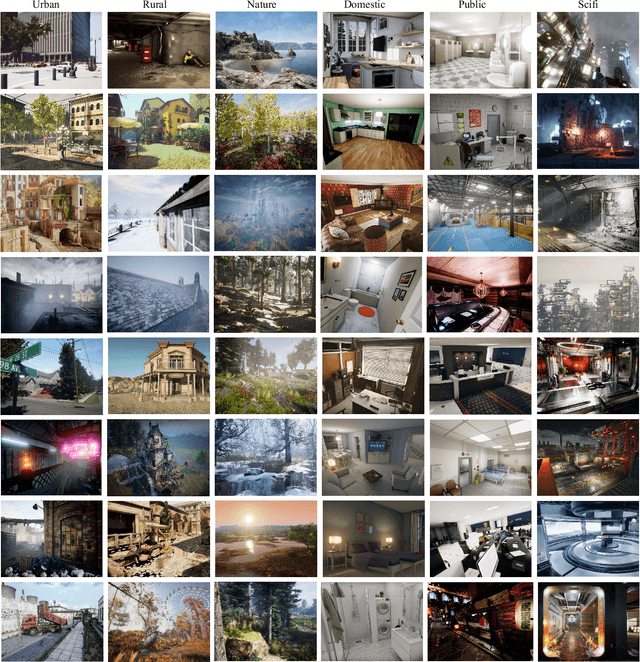
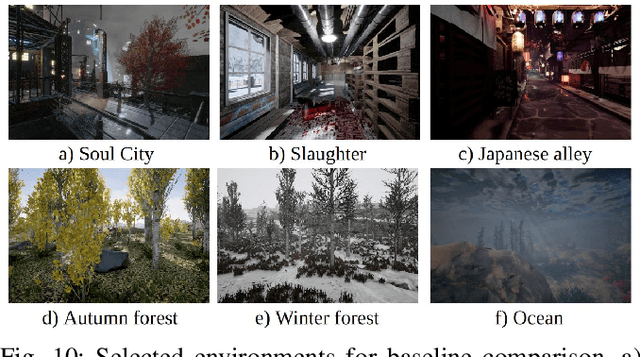
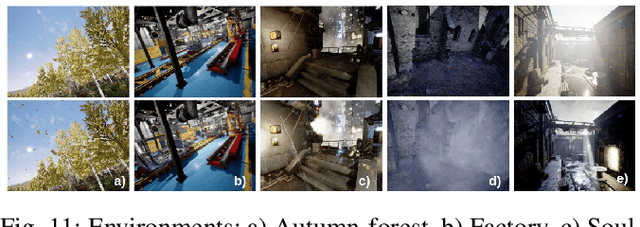

We present a challenging dataset, the TartanAir, for robot navigation task and more. The data is collected in photo-realistic simulation environments in the presence of various light conditions, weather and moving objects. By collecting data in simulation, we are able to obtain multi-modal sensor data and precise ground truth labels, including the stereo RGB image, depth image, segmentation, optical flow, camera poses, and LiDAR point cloud. We set up a large number of environments with various styles and scenes, covering challenging viewpoints and diverse motion patterns, which are difficult to achieve by using physical data collection platforms.
View paper on