 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Diffusion Policy: A Sparse, Reusable, and Flexible Policy for Robot Learning
Paper and Code
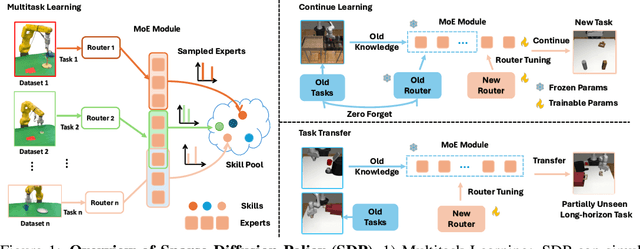

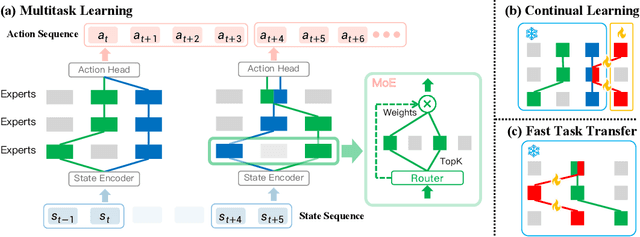

The increasing complexity of tasks in robotics demands efficient strategies for multitask and continual learning. Traditional models typically rely on a universal policy for all tasks, facing challenges such as high computational costs and catastrophic forgetting when learning new tasks. To address these issues, we introduce a sparse, reusable, and flexible policy, Sparse Diffusion Policy (SDP). By adopting Mixture of Experts (MoE) within a transformer-based diffusion policy, SDP selectively activates experts and skills, enabling efficient and task-specific learning without retraining the entire model. SDP not only reduces the burden of active parameters but also facilitates the seamless integration and reuse of experts across various tasks. Extensive experiments on diverse tasks in both simulations and real world show that SDP 1) excels in multitask scenarios with negligible increases in active parameters, 2) prevents forgetting in continual learning of new tasks, and 3) enables efficient task transfer, offering a promising solution for advanced robotic applications. Demos and codes can be found in https://forrest-110.github.io/sparse_diffusion_policy/.