Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandoverSim: A Simulation Framework and Benchmark for Human-to-Robot Object Handovers
Paper and Code
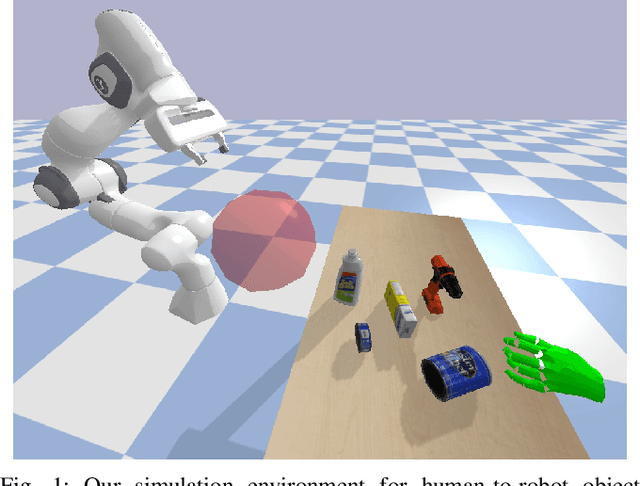

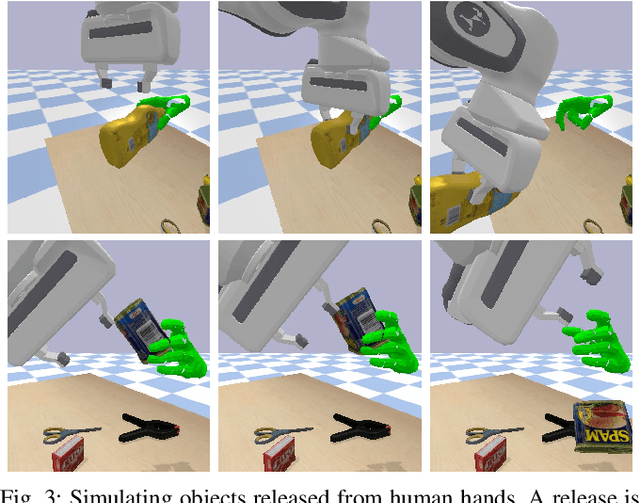
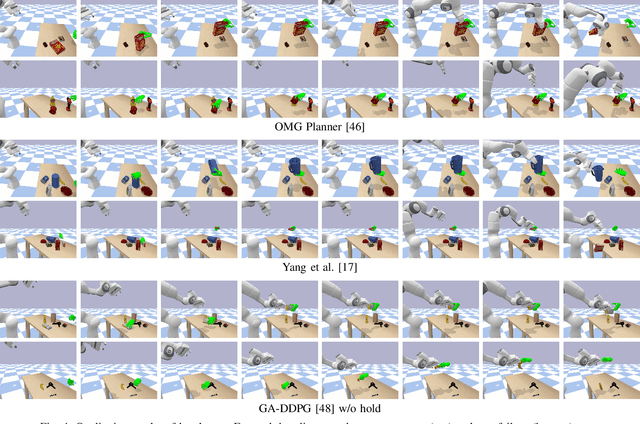
We introduce a new simulation benchmark "HandoverSim" for human-to-robot object handovers. To simulate the giver's motion, we leverage a recent motion capture dataset of hand grasping of objects. We create training and evaluation environments for the receiver with standardized protocols and metrics. We analyze the performance of a set of baselines and show a correlation with a real-world evaluation. Code is open sourced at https://handover-sim.github.io.
* Accepted to ICRA 2022
View paper on