 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiently Learning Single-Arm Fling Motions to Smooth Garments
Paper and Code
Jun 17, 2022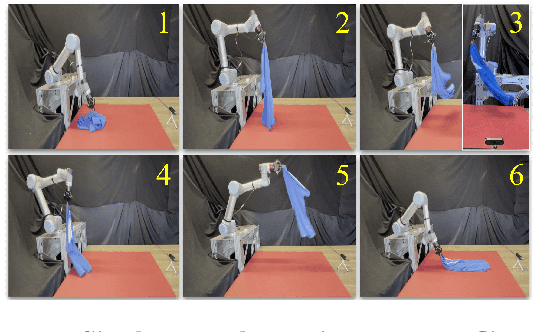
Recent work has shown that 2-arm "fling" motions can be effective for garment smoothing. We consider single-arm fling motions. Unlike 2-arm fling motions, which require little robot trajectory parameter tuning, single-arm fling motions are sensitive to trajectory parameters. We consider a single 6-DOF robot arm that learns fling trajectories to achieve high garment coverage. Given a garment grasp point, the robot explores different parameterized fling trajectories in physical experiments. To improve learning efficiency, we propose a coarse-to-fine learning method that first uses a multi-armed bandit (MAB) framework to efficiently find a candidate fling action, which it then refines via a continuous optimization method. Further, we propose novel training and execution-time stopping criteria based on fling outcome uncertainty. Compared to baselines, we show that the proposed method significantly accelerates learning. Moreover, with prior experience on similar garments collected through self-supervision, the MAB learning time for a new garment is reduced by up to 87%. We evaluate on 6 garment types: towels, T-shirts, long-sleeve shirts, dresses, sweat pants, and jeans. Results suggest that using prior experience, a robot requires under 30 minutes to learn a fling action for a novel garment that achieves 60-94% coverage.