 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBAPS: A Fine-Grained Low-Precision Scheme for Softmax in Attention via Block-Aware Precision reScaling
Feb 02, 2026As the performance gains from accelerating quantized matrix multiplication plateau, the softmax operation becomes the critical bottleneck in Transformer inference. This bottleneck stems from two hardware limitations: (1) limited data bandwidth between matrix and vector compute cores, and (2) the significant area cost of high-precision (FP32/16) exponentiation units (EXP2). To address these issues, we introduce a novel low-precision workflow that employs a specific 8-bit floating-point format (HiF8) and block-aware precision rescaling for softmax. Crucially, our algorithmic innovations make low-precision softmax feasible without the significant model accuracy loss that hampers direct low-precision approaches. Specifically, our design (i) halves the required data movement bandwidth by enabling matrix multiplication outputs constrained to 8-bit, and (ii) substantially reduces the EXP2 unit area by computing exponentiations in low (8-bit) precision. Extensive evaluation on language models and multi-modal models confirms the validity of our method. By alleviating the vector computation bottleneck, our work paves the way for doubling end-to-end inference throughput without increasing chip area, and offers a concrete co-design path for future low-precision hardware and software.
AvatarTex: High-Fidelity Facial Texture Reconstruction from Single-Image Stylized Avatars
Nov 10, 2025We present AvatarTex, a high-fidelity facial texture reconstruction framework capable of generating both stylized and photorealistic textures from a single image. Existing methods struggle with stylized avatars due to the lack of diverse multi-style datasets and challenges in maintaining geometric consistency in non-standard textures. To address these limitations, AvatarTex introduces a novel three-stage diffusion-to-GAN pipeline. Our key insight is that while diffusion models excel at generating diversified textures, they lack explicit UV constraints, whereas GANs provide a well-structured latent space that ensures style and topology consistency. By integrating these strengths, AvatarTex achieves high-quality topology-aligned texture synthesis with both artistic and geometric coherence. Specifically, our three-stage pipeline first completes missing texture regions via diffusion-based inpainting, refines style and structure consistency using GAN-based latent optimization, and enhances fine details through diffusion-based repainting. To address the need for a stylized texture dataset, we introduce TexHub, a high-resolution collection of 20,000 multi-style UV textures with precise UV-aligned layouts. By leveraging TexHub and our structured diffusion-to-GAN pipeline, AvatarTex establishes a new state-of-the-art in multi-style facial texture reconstruction. TexHub will be released upon publication to facilitate future research in this field.
DreamDissector: Learning Disentangled Text-to-3D Generation from 2D Diffusion Priors
Jul 23, 2024
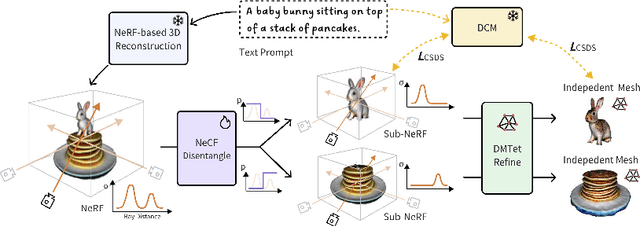
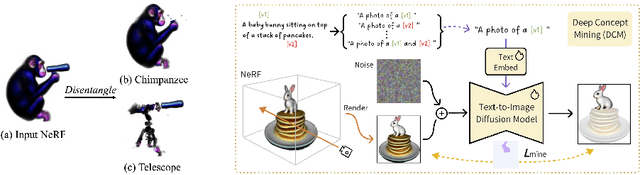
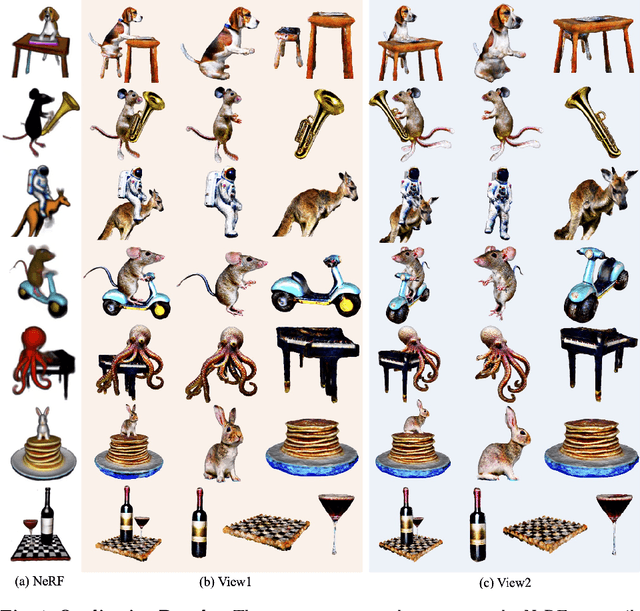
Text-to-3D generation has recently seen significant progress. To enhance its practicality in real-world applications, it is crucial to generate multiple independent objects with interactions, similar to layer-compositing in 2D image editing. However, existing text-to-3D methods struggle with this task, as they are designed to generate either non-independent objects or independent objects lacking spatially plausible interactions. Addressing this, we propose DreamDissector, a text-to-3D method capable of generating multiple independent objects with interactions. DreamDissector accepts a multi-object text-to-3D NeRF as input and produces independent textured meshes. To achieve this, we introduce the Neural Category Field (NeCF) for disentangling the input NeRF. Additionally, we present the Category Score Distillation Sampling (CSDS), facilitated by a Deep Concept Mining (DCM) module, to tackle the concept gap issue in diffusion models. By leveraging NeCF and CSDS, we can effectively derive sub-NeRFs from the original scene. Further refinement enhances geometry and texture. Our experimental results validate the effectiveness of DreamDissector, providing users with novel means to control 3D synthesis at the object level and potentially opening avenues for various creative applications in the future.
Fast Simulation of Particulate Suspensions Enabled by Graph Neural Network
Jun 17, 2022

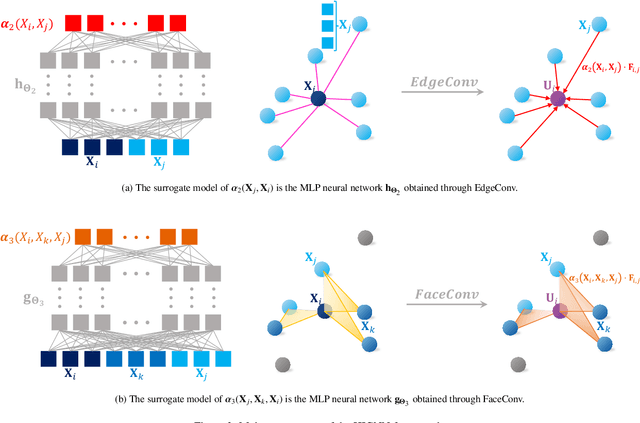

Predicting the dynamic behaviors of particles in suspension subject to hydrodynamic interaction (HI) and external drive can be critical for many applications. By harvesting advanced deep learning techniques, the present work introduces a new framework, hydrodynamic interaction graph neural network (HIGNN), for inferring and predicting the particles' dynamics in Stokes suspensions. It overcomes the limitations of traditional approaches in computational efficiency, accuracy, and/or transferability. In particular, by uniting the data structure represented by a graph and the neural networks with learnable parameters, the HIGNN constructs surrogate modeling for the mobility tensor of particles which is the key to predicting the dynamics of particles subject to HI and external forces. To account for the many-body nature of HI, we generalize the state-of-the-art GNN by introducing higher-order connectivity into the graph and the corresponding convolutional operation. For training the HIGNN, we only need the data for a small number of particles in the domain of interest, and hence the training cost can be maintained low. Once constructed, the HIGNN permits fast predictions of the particles' velocities and is transferable to suspensions of different numbers/concentrations of particles in the same domain and to any external forcing. It has the ability to accurately capture both the long-range HI and short-range lubrication effects. We demonstrate the accuracy, efficiency, and transferability of the proposed HIGNN framework in a variety of systems. The requirement on computing resource is minimum: most simulations only require a desktop with one GPU; the simulations for a large suspension of 100,000 particles call for up to 6 GPUs.