 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Simulation of Particulate Suspensions Enabled by Graph Neural Network
Jun 17, 2022

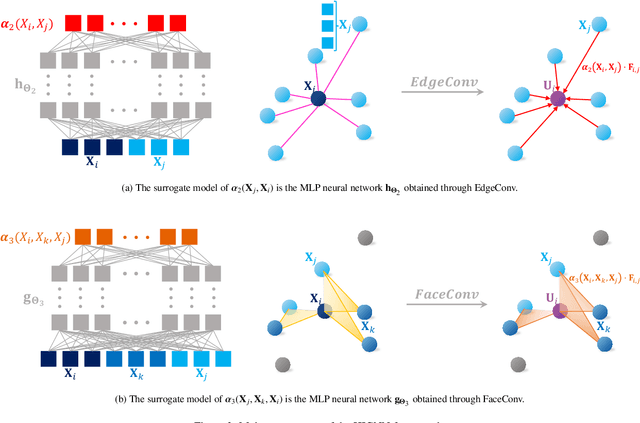

Predicting the dynamic behaviors of particles in suspension subject to hydrodynamic interaction (HI) and external drive can be critical for many applications. By harvesting advanced deep learning techniques, the present work introduces a new framework, hydrodynamic interaction graph neural network (HIGNN), for inferring and predicting the particles' dynamics in Stokes suspensions. It overcomes the limitations of traditional approaches in computational efficiency, accuracy, and/or transferability. In particular, by uniting the data structure represented by a graph and the neural networks with learnable parameters, the HIGNN constructs surrogate modeling for the mobility tensor of particles which is the key to predicting the dynamics of particles subject to HI and external forces. To account for the many-body nature of HI, we generalize the state-of-the-art GNN by introducing higher-order connectivity into the graph and the corresponding convolutional operation. For training the HIGNN, we only need the data for a small number of particles in the domain of interest, and hence the training cost can be maintained low. Once constructed, the HIGNN permits fast predictions of the particles' velocities and is transferable to suspensions of different numbers/concentrations of particles in the same domain and to any external forcing. It has the ability to accurately capture both the long-range HI and short-range lubrication effects. We demonstrate the accuracy, efficiency, and transferability of the proposed HIGNN framework in a variety of systems. The requirement on computing resource is minimum: most simulations only require a desktop with one GPU; the simulations for a large suspension of 100,000 particles call for up to 6 GPUs.