 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFutureX-Pro: Extending Future Prediction to High-Value Vertical Domains
Jan 18, 2026Building upon FutureX, which established a live benchmark for general-purpose future prediction, this report introduces FutureX-Pro, including FutureX-Finance, FutureX-Retail, FutureX-PublicHealth, FutureX-NaturalDisaster, and FutureX-Search. These together form a specialized framework extending agentic future prediction to high-value vertical domains. While generalist agents demonstrate proficiency in open-domain search, their reliability in capital-intensive and safety-critical sectors remains under-explored. FutureX-Pro targets four economically and socially pivotal verticals: Finance, Retail, Public Health, and Natural Disaster. We benchmark agentic Large Language Models (LLMs) on entry-level yet foundational prediction tasks -- ranging from forecasting market indicators and supply chain demands to tracking epidemic trends and natural disasters. By adapting the contamination-free, live-evaluation pipeline of FutureX, we assess whether current State-of-the-Art (SOTA) agentic LLMs possess the domain grounding necessary for industrial deployment. Our findings reveal the performance gap between generalist reasoning and the precision required for high-value vertical applications.
HiGR: Efficient Generative Slate Recommendation via Hierarchical Planning and Multi-Objective Preference Alignment
Dec 31, 2025Slate recommendation, where users are presented with a ranked list of items simultaneously, is widely adopted in online platforms. Recent advances in generative models have shown promise in slate recommendation by modeling sequences of discrete semantic IDs autoregressively. However, existing autoregressive approaches suffer from semantically entangled item tokenization and inefficient sequential decoding that lacks holistic slate planning. To address these limitations, we propose HiGR, an efficient generative slate recommendation framework that integrates hierarchical planning with listwise preference alignment. First, we propose an auto-encoder utilizing residual quantization and contrastive constraints to tokenize items into semantically structured IDs for controllable generation. Second, HiGR decouples generation into a list-level planning stage for global slate intent, followed by an item-level decoding stage for specific item selection. Third, we introduce a listwise preference alignment objective to directly optimize slate quality using implicit user feedback. Experiments on our large-scale commercial media platform demonstrate that HiGR delivers consistent improvements in both offline evaluations and online deployment. Specifically, it outperforms state-of-the-art methods by over 10% in offline recommendation quality with a 5x inference speedup, while further achieving a 1.22% and 1.73% increase in Average Watch Time and Average Video Views in online A/B tests.
Clipped Gradient Methods for Nonsmooth Convex Optimization under Heavy-Tailed Noise: A Refined Analysis
Dec 29, 2025Optimization under heavy-tailed noise has become popular recently, since it better fits many modern machine learning tasks, as captured by empirical observations. Concretely, instead of a finite second moment on gradient noise, a bounded ${\frak p}$-th moment where ${\frak p}\in(1,2]$ has been recognized to be more realistic (say being upper bounded by $σ_{\frak l}^{\frak p}$ for some $σ_{\frak l}\ge0$). A simple yet effective operation, gradient clipping, is known to handle this new challenge successfully. Specifically, Clipped Stochastic Gradient Descent (Clipped SGD) guarantees a high-probability rate ${\cal O}(σ_{\frak l}\ln(1/δ)T^{1/{\frak p}-1})$ (resp. ${\cal O}(σ_{\frak l}^2\ln^2(1/δ)T^{2/{\frak p}-2})$) for nonsmooth convex (resp. strongly convex) problems, where $δ\in(0,1]$ is the failure probability and $T\in\mathbb{N}$ is the time horizon. In this work, we provide a refined analysis for Clipped SGD and offer two faster rates, ${\cal O}(σ_{\frak l}d_{\rm eff}^{-1/2{\frak p}}\ln^{1-1/{\frak p}}(1/δ)T^{1/{\frak p}-1})$ and ${\cal O}(σ_{\frak l}^2d_{\rm eff}^{-1/{\frak p}}\ln^{2-2/{\frak p}}(1/δ)T^{2/{\frak p}-2})$, than the aforementioned best results, where $d_{\rm eff}\ge1$ is a quantity we call the $\textit{generalized effective dimension}$. Our analysis improves upon the existing approach on two sides: better utilization of Freedman's inequality and finer bounds for clipping error under heavy-tailed noise. In addition, we extend the refined analysis to convergence in expectation and obtain new rates that break the known lower bounds. Lastly, to complement the study, we establish new lower bounds for both high-probability and in-expectation convergence. Notably, the in-expectation lower bounds match our new upper bounds, indicating the optimality of our refined analysis for convergence in expectation.
Online Convex Optimization with Heavy Tails: Old Algorithms, New Regrets, and Applications
Aug 10, 2025In Online Convex Optimization (OCO), when the stochastic gradient has a finite variance, many algorithms provably work and guarantee a sublinear regret. However, limited results are known if the gradient estimate has a heavy tail, i.e., the stochastic gradient only admits a finite $\mathsf{p}$-th central moment for some $\mathsf{p}\in\left(1,2\right]$. Motivated by it, this work examines different old algorithms for OCO (e.g., Online Gradient Descent) in the more challenging heavy-tailed setting. Under the standard bounded domain assumption, we establish new regrets for these classical methods without any algorithmic modification. Remarkably, these regret bounds are fully optimal in all parameters (can be achieved even without knowing $\mathsf{p}$), suggesting that OCO with heavy tails can be solved effectively without any extra operation (e.g., gradient clipping). Our new results have several applications. A particularly interesting one is the first provable convergence result for nonsmooth nonconvex optimization under heavy-tailed noise without gradient clipping. Furthermore, we explore broader settings (e.g., smooth OCO) and extend our ideas to optimistic algorithms to handle different cases simultaneously.
Improved Last-Iterate Convergence of Shuffling Gradient Methods for Nonsmooth Convex Optimization
May 29, 2025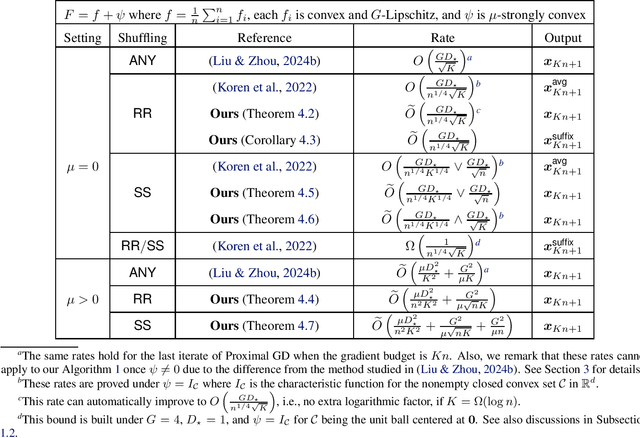
We study the convergence of the shuffling gradient method, a popular algorithm employed to minimize the finite-sum function with regularization, in which functions are passed to apply (Proximal) Gradient Descent (GD) one by one whose order is determined by a permutation on the indices of functions. In contrast to its easy implementation and effective performance in practice, the theoretical understanding remains limited. A recent advance by (Liu & Zhou, 2024b) establishes the first last-iterate convergence results under various settings, especially proving the optimal rates for smooth (strongly) convex optimization. However, their bounds for nonsmooth (strongly) convex functions are only as fast as Proximal GD. In this work, we provide the first improved last-iterate analysis for the nonsmooth case demonstrating that the widely used Random Reshuffle ($\textsf{RR}$) and Single Shuffle ($\textsf{SS}$) strategies are both provably faster than Proximal GD, reflecting the benefit of randomness. As an important implication, we give the first (nearly) optimal convergence result for the suffix average under the $\textsf{RR}$ sampling scheme in the general convex case, matching the lower bound shown by (Koren et al., 2022).
Nonconvex Stochastic Optimization under Heavy-Tailed Noises: Optimal Convergence without Gradient Clipping
Dec 27, 2024Recently, the study of heavy-tailed noises in first-order nonconvex stochastic optimization has gotten a lot of attention since it was recognized as a more realistic condition as suggested by many empirical observations. Specifically, the stochastic noise (the difference between the stochastic and true gradient) is considered only to have a finite $\mathfrak{p}$-th moment where $\mathfrak{p}\in\left(1,2\right]$ instead of assuming it always satisfies the classical finite variance assumption. To deal with this more challenging setting, people have proposed different algorithms and proved them to converge at an optimal $\mathcal{O}(T^{\frac{1-\mathfrak{p}}{3\mathfrak{p}-2}})$ rate for smooth objectives after $T$ iterations. Notably, all these new-designed algorithms are based on the same technique - gradient clipping. Naturally, one may want to know whether the clipping method is a necessary ingredient and the only way to guarantee convergence under heavy-tailed noises. In this work, by revisiting the existing Batched Normalized Stochastic Gradient Descent with Momentum (Batched NSGDM) algorithm, we provide the first convergence result under heavy-tailed noises but without gradient clipping. Concretely, we prove that Batched NSGDM can achieve the optimal $\mathcal{O}(T^{\frac{1-\mathfrak{p}}{3\mathfrak{p}-2}})$ rate even under the relaxed smooth condition. More interestingly, we also establish the first $\mathcal{O}(T^{\frac{1-\mathfrak{p}}{2\mathfrak{p}}})$ convergence rate in the case where the tail index $\mathfrak{p}$ is unknown in advance, which is arguably the common scenario in practice.
On the Last-Iterate Convergence of Shuffling Gradient Methods
Mar 12, 2024


Shuffling gradient methods, which are also known as stochastic gradient descent (SGD) without replacement, are widely implemented in practice, particularly including three popular algorithms: Random Reshuffle (RR), Shuffle Once (SO), and Incremental Gradient (IG). Compared to the empirical success, the theoretical guarantee of shuffling gradient methods was not well-understanding for a long time. Until recently, the convergence rates had just been established for the average iterate for convex functions and the last iterate for strongly convex problems (using squared distance as the metric). However, when using the function value gap as the convergence criterion, existing theories cannot interpret the good performance of the last iterate in different settings (e.g., constrained optimization). To bridge this gap between practice and theory, we prove last-iterate convergence rates for shuffling gradient methods with respect to the objective value even without strong convexity. Our new results either (nearly) match the existing last-iterate lower bounds or are as fast as the previous best upper bounds for the average iterate.
Revisiting the Last-Iterate Convergence of Stochastic Gradient Methods
Dec 13, 2023In the past several years, the convergence of the last iterate of the Stochastic Gradient Descent (SGD) algorithm has triggered people's interest due to its good performance in practice but lack of theoretical understanding. For Lipschitz and convex functions, different works have established the optimal $O(\log(1/\delta)\log T/\sqrt{T})$ or $O(\sqrt{\log(1/\delta)/T})$ high-probability convergence rates for the final iterate, where $T$ is the time horizon and $\delta$ is the failure probability. However, to prove these bounds, all the existing works are limited to compact domains or require almost surely bounded noises. It is natural to ask whether the last iterate of SGD can still guarantee the optimal convergence rate but without these two restrictive assumptions. Besides this important question, there are still lots of theoretical problems lacking an answer. For example, compared with the last iterate convergence of SGD for non-smooth problems, only few results for smooth optimization have yet been developed. Additionally, the existing results are all limited to a non-composite objective and the standard Euclidean norm. It still remains unclear whether the last-iterate convergence can be provably extended to wider composite optimization and non-Euclidean norms. In this work, to address the issues mentioned above, we revisit the last-iterate convergence of stochastic gradient methods and provide the first unified way to prove the convergence rates both in expectation and in high probability to accommodate general domains, composite objectives, non-Euclidean norms, Lipschitz conditions, smoothness and (strong) convexity simultaneously. Additionally, we extend our analysis to obtain the last-iterate convergence under heavy-tailed noises.
STDA-Meta: A Meta-Learning Framework for Few-Shot Traffic Prediction
Oct 31, 2023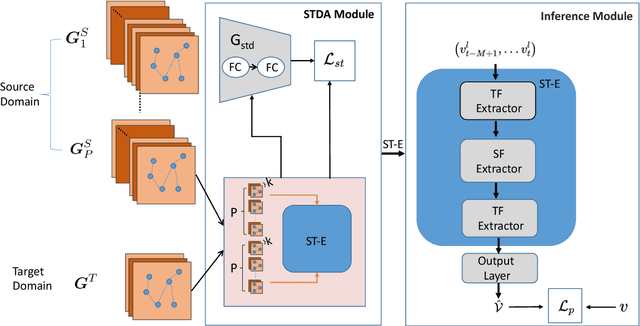
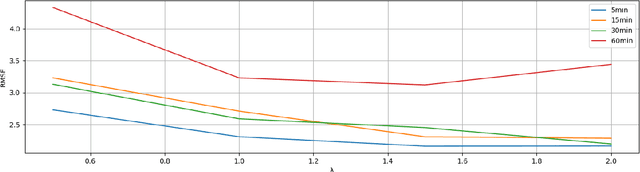
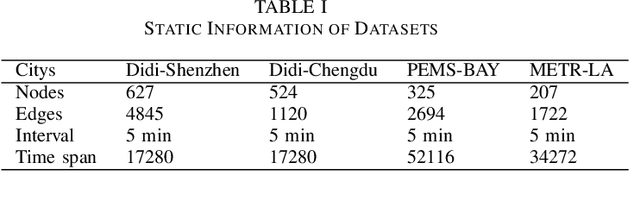
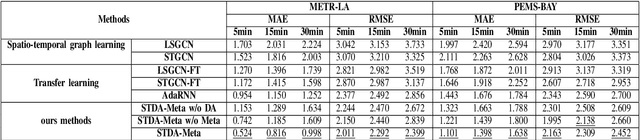
As the development of cities, traffic congestion becomes an increasingly pressing issue, and traffic prediction is a classic method to relieve that issue. Traffic prediction is one specific application of spatio-temporal prediction learning, like taxi scheduling, weather prediction, and ship trajectory prediction. Against these problems, classical spatio-temporal prediction learning methods including deep learning, require large amounts of training data. In reality, some newly developed cities with insufficient sensors would not hold that assumption, and the data scarcity makes predictive performance worse. In such situation, the learning method on insufficient data is known as few-shot learning (FSL), and the FSL of traffic prediction remains challenges. On the one hand, graph structures' irregularity and dynamic nature of graphs cannot hold the performance of spatio-temporal learning method. On the other hand, conventional domain adaptation methods cannot work well on insufficient training data, when transferring knowledge from different domains to the intended target domain.To address these challenges, we propose a novel spatio-temporal domain adaptation (STDA) method that learns transferable spatio-temporal meta-knowledge from data-sufficient cities in an adversarial manner. This learned meta-knowledge can improve the prediction performance of data-scarce cities. Specifically, we train the STDA model using a Model-Agnostic Meta-Learning (MAML) based episode learning process, which is a model-agnostic meta-learning framework that enables the model to solve new learning tasks using only a small number of training samples. We conduct numerous experiments on four traffic prediction datasets, and our results show that the prediction performance of our model has improved by 7\% compared to baseline models on the two metrics of MAE and RMSE.
Stochastic Nonsmooth Convex Optimization with Heavy-Tailed Noises
Mar 25, 2023Recently, several studies consider the stochastic optimization problem but in a heavy-tailed noise regime, i.e., the difference between the stochastic gradient and the true gradient is assumed to have a finite $p$-th moment (say being upper bounded by $\sigma^{p}$ for some $\sigma\geq0$) where $p\in(1,2]$, which not only generalizes the traditional finite variance assumption ($p=2$) but also has been observed in practice for several different tasks. Under this challenging assumption, lots of new progress has been made for either convex or nonconvex problems, however, most of which only consider smooth objectives. In contrast, people have not fully explored and well understood this problem when functions are nonsmooth. This paper aims to fill this crucial gap by providing a comprehensive analysis of stochastic nonsmooth convex optimization with heavy-tailed noises. We revisit a simple clipping-based algorithm, whereas, which is only proved to converge in expectation but under the additional strong convexity assumption. Under appropriate choices of parameters, for both convex and strongly convex functions, we not only establish the first high-probability rates but also give refined in-expectation bounds compared with existing works. Remarkably, all of our results are optimal (or nearly optimal up to logarithmic factors) with respect to the time horizon $T$ even when $T$ is unknown in advance. Additionally, we show how to make the algorithm parameter-free with respect to $\sigma$, in other words, the algorithm can still guarantee convergence without any prior knowledge of $\sigma$.