 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLSDM: LLM-Enhanced Spatio-temporal Diffusion Model for Service-Level Mobile Traffic Prediction
Jul 23, 2025



Service-level mobile traffic prediction for individual users is essential for network efficiency and quality of service enhancement. However, current prediction methods are limited in their adaptability across different urban environments and produce inaccurate results due to the high uncertainty in personal traffic patterns, the lack of detailed environmental context, and the complex dependencies among different network services. These challenges demand advanced modeling techniques that can capture dynamic traffic distributions and rich environmental features. Inspired by the recent success of diffusion models in distribution modeling and Large Language Models (LLMs) in contextual understanding, we propose an LLM-Enhanced Spatio-temporal Diffusion Model (LSDM). LSDM integrates the generative power of diffusion models with the adaptive learning capabilities of transformers, augmented by the ability to capture multimodal environmental information for modeling service-level patterns and dynamics. Extensive evaluations on real-world service-level datasets demonstrate that the model excels in traffic usage predictions, showing outstanding generalization and adaptability. After incorporating contextual information via LLM, the performance improves by at least 2.83% in terms of the coefficient of determination. Compared to models of a similar type, such as CSDI, the root mean squared error can be reduced by at least 8.29%. The code and dataset will be available at: https://github.com/SoftYuaneR/LSDM.
Pedestrian Trajectory Prediction Based on Social Interactions Learning With Random Weights
Jan 13, 2025



Pedestrian trajectory prediction is a critical technology in the evolution of self-driving cars toward complete artificial intelligence. Over recent years, focusing on the trajectories of pedestrians to model their social interactions has surged with great interest in more accurate trajectory predictions. However, existing methods for modeling pedestrian social interactions rely on pre-defined rules, struggling to capture non-explicit social interactions. In this work, we propose a novel framework named DTGAN, which extends the application of Generative Adversarial Networks (GANs) to graph sequence data, with the primary objective of automatically capturing implicit social interactions and achieving precise predictions of pedestrian trajectory. DTGAN innovatively incorporates random weights within each graph to eliminate the need for pre-defined interaction rules. We further enhance the performance of DTGAN by exploring diverse task loss functions during adversarial training, which yields improvements of 16.7\% and 39.3\% on metrics ADE and FDE, respectively. The effectiveness and accuracy of our framework are verified on two public datasets. The experimental results show that our proposed DTGAN achieves superior performance and is well able to understand pedestrians' intentions.
Predictive Clustering of Vessel Behavior Based on Hierarchical Trajectory Representation
Mar 15, 2024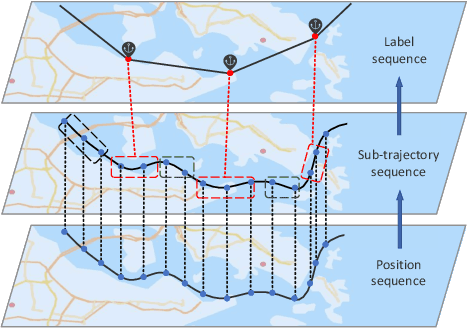
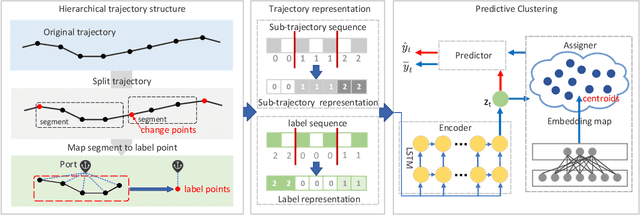
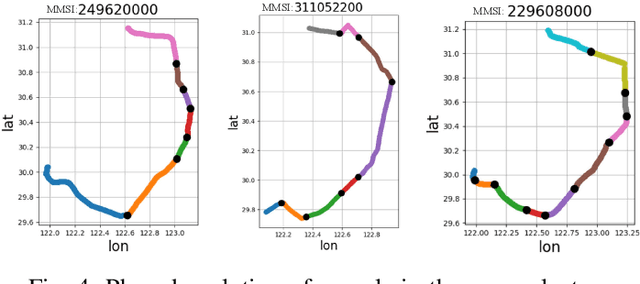
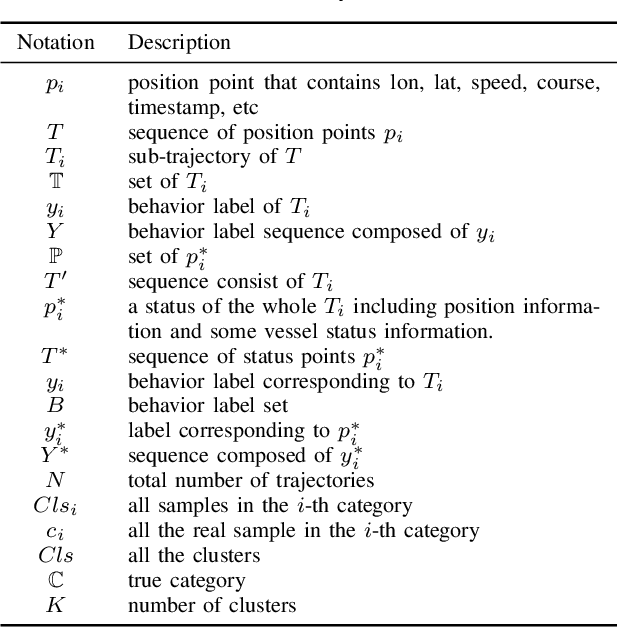
Vessel trajectory clustering, which aims to find similar trajectory patterns, has been widely leveraged in overwater applications. Most traditional methods use predefined rules and thresholds to identify discrete vessel behaviors. They aim for high-quality clustering and conduct clustering on entire sequences, whether the original trajectory or its sub-trajectories, failing to represent their evolution. To resolve this problem, we propose a Predictive Clustering of Hierarchical Vessel Behavior (PC-HiV). PC-HiV first uses hierarchical representations to transform every trajectory into a behavioral sequence. Then, it predicts evolution at each timestamp of the sequence based on the representations. By applying predictive clustering and latent encoding, PC-HiV improves clustering and predictions simultaneously. Experiments on real AIS datasets demonstrate PC-HiV's superiority over existing methods, showcasing its effectiveness in capturing behavioral evolution discrepancies between vessel types (tramp vs. liner) and within emission control areas. Results show that our method outperforms NN-Kmeans and Robust DAA by 3.9% and 6.4% of the purity score.