 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Multimodal Vessel Trajectory Prediction with Explainable Navigation Intention
Nov 18, 2025Vessel trajectory prediction is fundamental to intelligent maritime systems. Within this domain, short-term prediction of rapid behavioral changes in complex maritime environments has established multimodal trajectory prediction (MTP) as a promising research area. However, existing vessel MTP methods suffer from limited scenario applicability and insufficient explainability. To address these challenges, we propose a unified MTP framework incorporating explainable navigation intentions, which we classify into sustained and transient categories. Our method constructs sustained intention trees from historical trajectories and models dynamic transient intentions using a Conditional Variational Autoencoder (CVAE), while using a non-local attention mechanism to maintain global scenario consistency. Experiments on real Automatic Identification System (AIS) datasets demonstrates our method's broad applicability across diverse scenarios, achieving significant improvements in both ADE and FDE. Furthermore, our method improves explainability by explicitly revealing the navigational intentions underlying each predicted trajectory.
Testing Large Language Models on Driving Theory Knowledge and Skills for Connected Autonomous Vehicles
Jul 24, 2024


Handling long tail corner cases is a major challenge faced by autonomous vehicles (AVs). While large language models (LLMs) hold great potentials to handle the corner cases with excellent generalization and explanation capabilities and received increasing research interest on application to autonomous driving, there are still technical barriers to be tackled, such as strict model performance and huge computing resource requirements of LLMs. In this paper, we investigate a new approach of applying remote or edge LLMs to support autonomous driving. A key issue for such LLM assisted driving system is the assessment of LLMs on their understanding of driving theory and skills, ensuring they are qualified to undertake safety critical driving assistance tasks for CAVs. We design and run driving theory tests for several proprietary LLM models (OpenAI GPT models, Baidu Ernie and Ali QWen) and open-source LLM models (Tsinghua MiniCPM-2B and MiniCPM-Llama3-V2.5) with more than 500 multiple-choices theory test questions. Model accuracy, cost and processing latency are measured from the experiments. Experiment results show that while model GPT-4 passes the test with improved domain knowledge and Ernie has an accuracy of 85% (just below the 86% passing threshold), other LLM models including GPT-3.5 fail the test. For the test questions with images, the multimodal model GPT4-o has an excellent accuracy result of 96%, and the MiniCPM-Llama3-V2.5 achieves an accuracy of 76%. While GPT-4 holds stronger potential for CAV driving assistance applications, the cost of using model GPT4 is much higher, almost 50 times of that of using GPT3.5. The results can help make decision on the use of the existing LLMs for CAV applications and balancing on the model performance and cost.
Enhancing mmWave Radar Point Cloud via Visual-inertial Supervision
Apr 26, 2024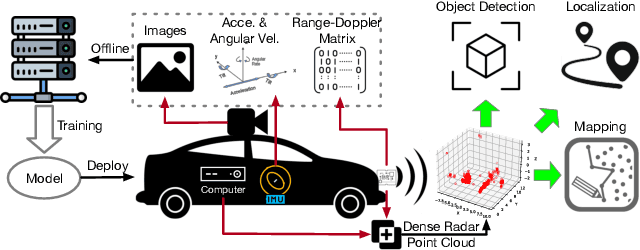
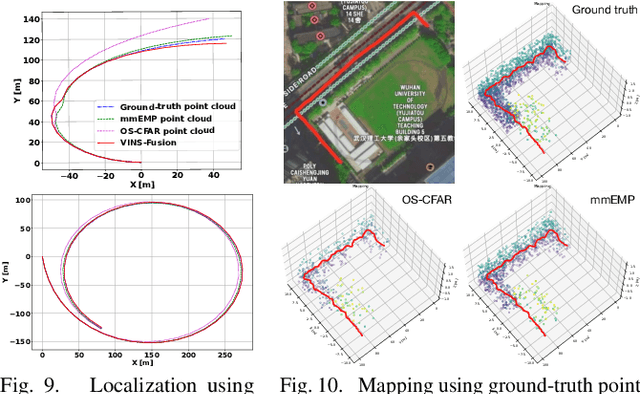
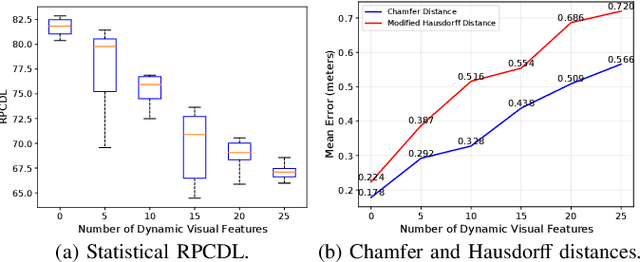
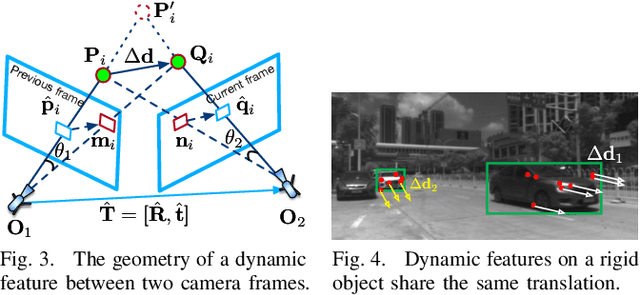
Complementary to prevalent LiDAR and camera systems, millimeter-wave (mmWave) radar is robust to adverse weather conditions like fog, rainstorms, and blizzards but offers sparse point clouds. Current techniques enhance the point cloud by the supervision of LiDAR's data. However, high-performance LiDAR is notably expensive and is not commonly available on vehicles. This paper presents mmEMP, a supervised learning approach that enhances radar point clouds using a low-cost camera and an inertial measurement unit (IMU), enabling crowdsourcing training data from commercial vehicles. Bringing the visual-inertial (VI) supervision is challenging due to the spatial agnostic of dynamic objects. Moreover, spurious radar points from the curse of RF multipath make robots misunderstand the scene. mmEMP first devises a dynamic 3D reconstruction algorithm that restores the 3D positions of dynamic features. Then, we design a neural network that densifies radar data and eliminates spurious radar points. We build a new dataset in the real world. Extensive experiments show that mmEMP achieves competitive performance compared with the SOTA approach training by LiDAR's data. In addition, we use the enhanced point cloud to perform object detection, localization, and mapping to demonstrate mmEMP's effectiveness.
Predictive Clustering of Vessel Behavior Based on Hierarchical Trajectory Representation
Mar 15, 2024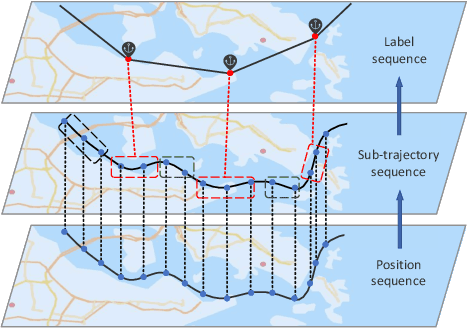
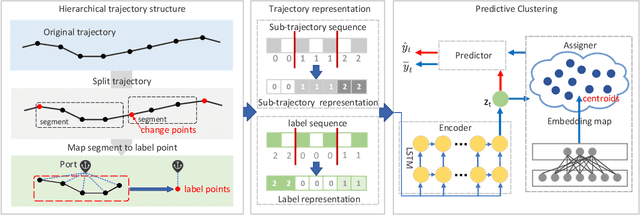
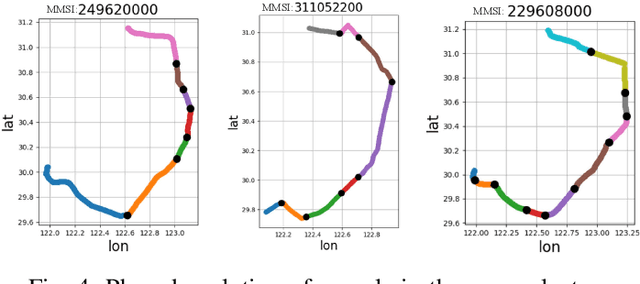
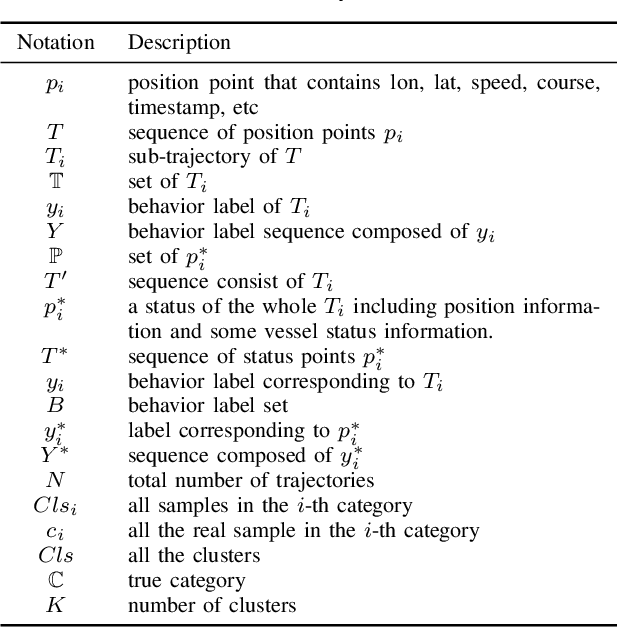
Vessel trajectory clustering, which aims to find similar trajectory patterns, has been widely leveraged in overwater applications. Most traditional methods use predefined rules and thresholds to identify discrete vessel behaviors. They aim for high-quality clustering and conduct clustering on entire sequences, whether the original trajectory or its sub-trajectories, failing to represent their evolution. To resolve this problem, we propose a Predictive Clustering of Hierarchical Vessel Behavior (PC-HiV). PC-HiV first uses hierarchical representations to transform every trajectory into a behavioral sequence. Then, it predicts evolution at each timestamp of the sequence based on the representations. By applying predictive clustering and latent encoding, PC-HiV improves clustering and predictions simultaneously. Experiments on real AIS datasets demonstrate PC-HiV's superiority over existing methods, showcasing its effectiveness in capturing behavioral evolution discrepancies between vessel types (tramp vs. liner) and within emission control areas. Results show that our method outperforms NN-Kmeans and Robust DAA by 3.9% and 6.4% of the purity score.