 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Generative Auto-bidding with Offline Reward Evaluation and Policy Search
Sep 19, 2025Auto-bidding is an essential tool for advertisers to enhance their advertising performance. Recent progress has shown that AI-Generated Bidding (AIGB), which formulates the auto-bidding as a trajectory generation task and trains a conditional diffusion-based planner on offline data, achieves superior and stable performance compared to typical offline reinforcement learning (RL)-based auto-bidding methods. However, existing AIGB methods still encounter a performance bottleneck due to their neglect of fine-grained generation quality evaluation and inability to explore beyond static datasets. To address this, we propose AIGB-Pearl (\emph{Planning with EvAluator via RL}), a novel method that integrates generative planning and policy optimization. The key to AIGB-Pearl is to construct a non-bootstrapped \emph{trajectory evaluator} to assign rewards and guide policy search, enabling the planner to optimize its generation quality iteratively through interaction. Furthermore, to enhance trajectory evaluator accuracy in offline settings, we incorporate three key techniques: (i) a Large Language Model (LLM)-based architecture for better representational capacity, (ii) hybrid point-wise and pair-wise losses for better score learning, and (iii) adaptive integration of expert feedback for better generalization ability. Extensive experiments on both simulated and real-world advertising systems demonstrate the state-of-the-art performance of our approach.
Nash Equilibrium Constrained Auto-bidding With Bi-level Reinforcement Learning
Mar 13, 2025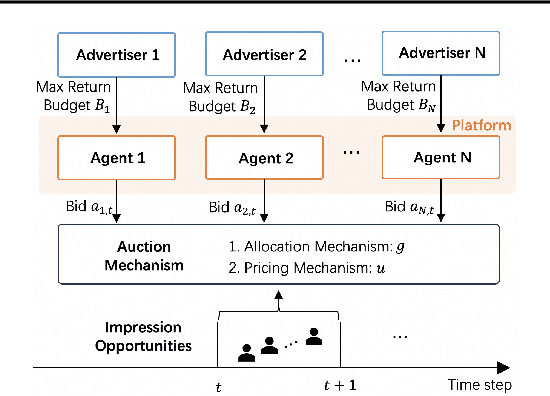
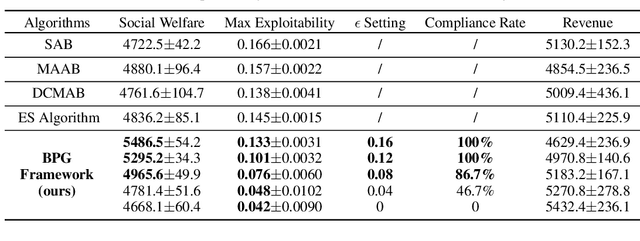
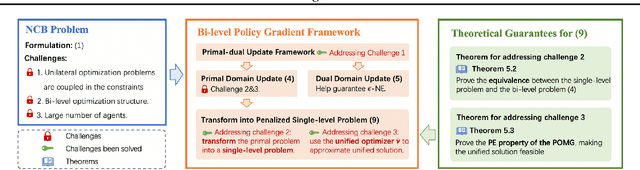

Many online advertising platforms provide advertisers with auto-bidding services to enhance their advertising performance. However, most existing auto-bidding algorithms fail to accurately capture the auto-bidding problem formulation that the platform truly faces, let alone solve it. Actually, we argue that the platform should try to help optimize each advertiser's performance to the greatest extent -- which makes $\epsilon$-Nash Equilibrium ($\epsilon$-NE) a necessary solution concept -- while maximizing the social welfare of all the advertisers for the platform's long-term value. Based on this, we introduce the \emph{Nash-Equilibrium Constrained Bidding} (NCB), a new formulation of the auto-bidding problem from the platform's perspective. Specifically, it aims to maximize the social welfare of all advertisers under the $\epsilon$-NE constraint. However, the NCB problem presents significant challenges due to its constrained bi-level structure and the typically large number of advertisers involved. To address these challenges, we propose a \emph{Bi-level Policy Gradient} (BPG) framework with theoretical guarantees. Notably, its computational complexity is independent of the number of advertisers, and the associated gradients are straightforward to compute. Extensive simulated and real-world experiments validate the effectiveness of the BPG framework.
Millimeter Wave Wireless Communication Assisted Three-Dimensional Simultaneous Localization and Mapping
Mar 05, 2023In this paper, we study the three-dimensional (3D) simultaneous localization and mapping (SLAM) problem in complex outdoor and indoor environments based only on millimeter-wave (mmWave) wireless communication signals. Firstly, we propose a deep-learning based mapping (DLM) algorithm that can leverage the reflections point on the first-order none line-of-sight (NLOS) communications links (CLs) to build the 3D point cloud map of the environment. Specifically, we design a classification neural network to identify the first-order NLOS CL and theoretically calculate the geometric coordinates of the reflection points on it. Secondly, we take the advantage of both the inertial measurement unit and the beam-squint assisted localization method to realize real-time and precise localizations. Then, combining the DLM and the adopted localization algorithm, we develop the communication-based SLAM (C-SLAM) framework that can carry out SLAM without any prior knowledge of the environment. Moreover, extensive simulations of both complex outdoor and indoor environments validate the effectiveness of our approach.
Sustainable Online Reinforcement Learning for Auto-bidding
Oct 13, 2022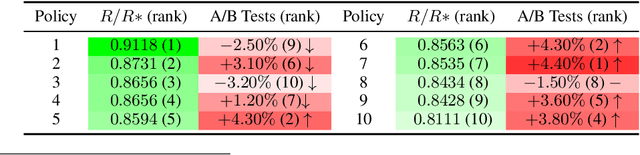
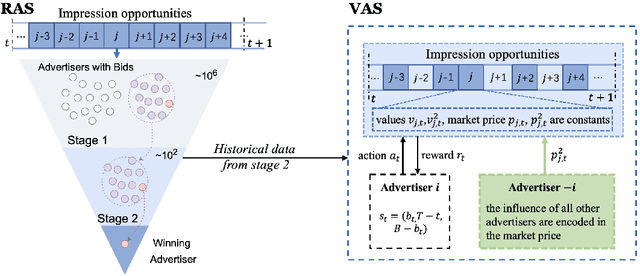
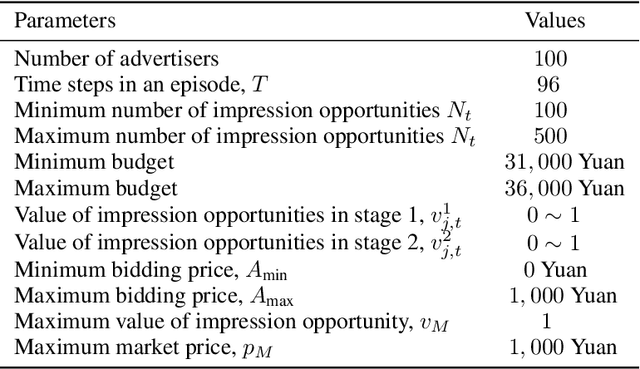
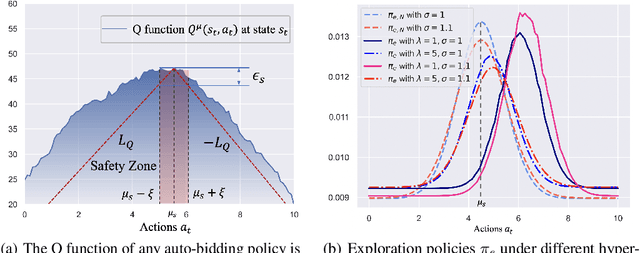
Recently, auto-bidding technique has become an essential tool to increase the revenue of advertisers. Facing the complex and ever-changing bidding environments in the real-world advertising system (RAS), state-of-the-art auto-bidding policies usually leverage reinforcement learning (RL) algorithms to generate real-time bids on behalf of the advertisers. Due to safety concerns, it was believed that the RL training process can only be carried out in an offline virtual advertising system (VAS) that is built based on the historical data generated in the RAS. In this paper, we argue that there exists significant gaps between the VAS and RAS, making the RL training process suffer from the problem of inconsistency between online and offline (IBOO). Firstly, we formally define the IBOO and systematically analyze its causes and influences. Then, to avoid the IBOO, we propose a sustainable online RL (SORL) framework that trains the auto-bidding policy by directly interacting with the RAS, instead of learning in the VAS. Specifically, based on our proof of the Lipschitz smooth property of the Q function, we design a safe and efficient online exploration (SER) policy for continuously collecting data from the RAS. Meanwhile, we derive the theoretical lower bound on the safety of the SER policy. We also develop a variance-suppressed conservative Q-learning (V-CQL) method to effectively and stably learn the auto-bidding policy with the collected data. Finally, extensive simulated and real-world experiments validate the superiority of our approach over the state-of-the-art auto-bidding algorithm.
Cluster Head Detection for Hierarchical UAV Swarm With Graph Self-supervised Learning
Mar 08, 2022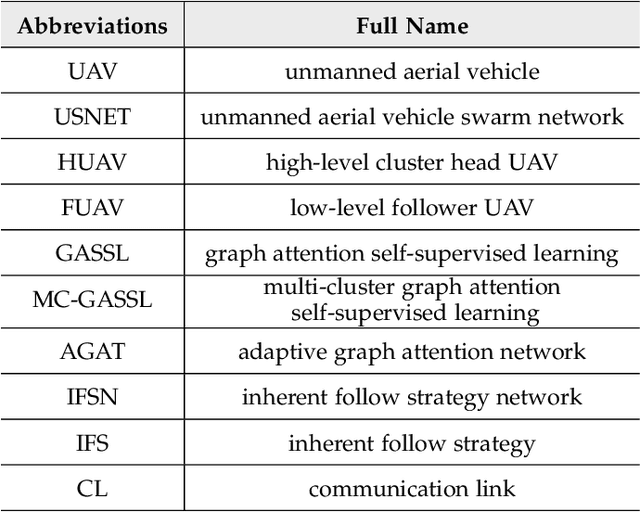
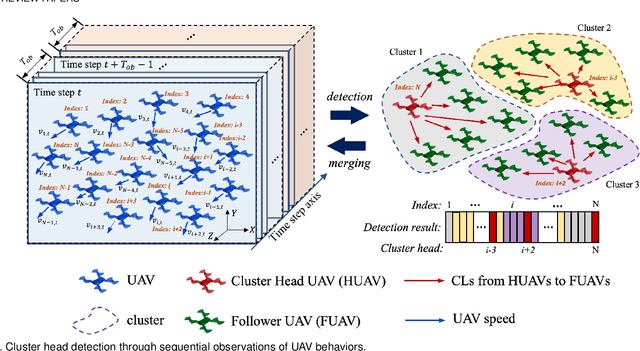
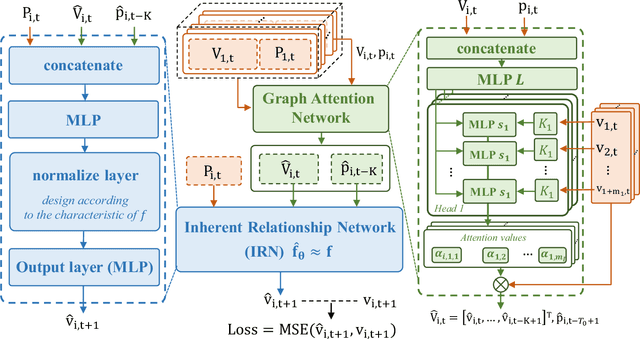

In this paper, we study the cluster head detection problem of a two-level unmanned aerial vehicle (UAV) swarm network (USNET) with multiple UAV clusters, where the inherent follow strategy (IFS) of low-level follower UAVs (FUAVs) with respect to high-level cluster head UAVs (HUAVs) is unknown. We first propose a graph attention self-supervised learning algorithm (GASSL) to detect the HUAVs of a single UAV cluster, where the GASSL can fit the IFS at the same time. Then, to detect the HUAVs in the USNET with multiple UAV clusters, we develop a multi-cluster graph attention self-supervised learning algorithm (MC-GASSL) based on the GASSL. The MC-GASSL clusters the USNET with a gated recurrent unit (GRU)-based metric learning scheme and finds the HUAVs in each cluster with GASSL. Numerical results show that the GASSL can detect the HUAVs in single UAV clusters obeying various kinds of IFSs with over 98% average accuracy. The simulation results also show that the clustering purity of the USNET with MC-GASSL exceeds that with traditional clustering algorithms by at least 10% average. Furthermore, the MC-GASSL can efficiently detect all the HUAVs in USNETs with various IFSs and cluster numbers with low detection redundancies.
Resilient UAV Swarm Communications with Graph Convolutional Neural Network
Jun 30, 2021

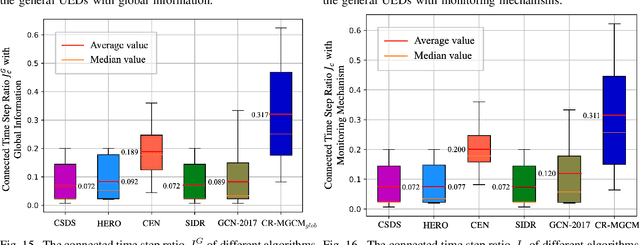
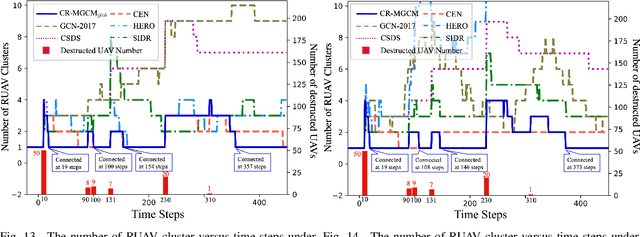
In this paper, we study the self-healing problem of unmanned aerial vehicle (UAV) swarm network (USNET) that is required to quickly rebuild the communication connectivity under unpredictable external disruptions (UEDs). Firstly, to cope with the one-off UEDs, we propose a graph convolutional neural network (GCN) and find the recovery topology of the USNET in an on-line manner. Secondly, to cope with general UEDs, we develop a GCN based trajectory planning algorithm that can make UAVs rebuild the communication connectivity during the self-healing process. We also design a meta learning scheme to facilitate the on-line executions of the GCN. Numerical results show that the proposed algorithms can rebuild the communication connectivity of the USNET more quickly than the existing algorithms under both one-off UEDs and general UEDs. The simulation results also show that the meta learning scheme can not only enhance the performance of the GCN but also reduce the time complexity of the on-line executions.