 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRIFT open dataset: A drone-derived intelligence for traffic analysis in urban environmen
Apr 15, 2025Reliable traffic data are essential for understanding urban mobility and developing effective traffic management strategies. This study introduces the DRone-derived Intelligence For Traffic analysis (DRIFT) dataset, a large-scale urban traffic dataset collected systematically from synchronized drone videos at approximately 250 meters altitude, covering nine interconnected intersections in Daejeon, South Korea. DRIFT provides high-resolution vehicle trajectories that include directional information, processed through video synchronization and orthomap alignment, resulting in a comprehensive dataset of 81,699 vehicle trajectories. Through our DRIFT dataset, researchers can simultaneously analyze traffic at multiple scales - from individual vehicle maneuvers like lane-changes and safety metrics such as time-to-collision to aggregate network flow dynamics across interconnected urban intersections. The DRIFT dataset is structured to enable immediate use without additional preprocessing, complemented by open-source models for object detection and trajectory extraction, as well as associated analytical tools. DRIFT is expected to significantly contribute to academic research and practical applications, such as traffic flow analysis and simulation studies. The dataset and related resources are publicly accessible at https://github.com/AIxMobility/The-DRIFT.
A Gentle Introduction and Tutorial on Deep Generative Models in Transportation Research
Oct 09, 2024Deep Generative Models (DGMs) have rapidly advanced in recent years, becoming essential tools in various fields due to their ability to learn complex data distributions and generate synthetic data. Their importance in transportation research is increasingly recognized, particularly for applications like traffic data generation, prediction, and feature extraction. This paper offers a comprehensive introduction and tutorial on DGMs, with a focus on their applications in transportation. It begins with an overview of generative models, followed by detailed explanations of fundamental models, a systematic review of the literature, and practical tutorial code to aid implementation. The paper also discusses current challenges and opportunities, highlighting how these models can be effectively utilized and further developed in transportation research. This paper serves as a valuable reference, guiding researchers and practitioners from foundational knowledge to advanced applications of DGMs in transportation research.
Deep Learning Methods for Adjusting Global MFD Speed Estimations to Local Link Configurations
May 23, 2024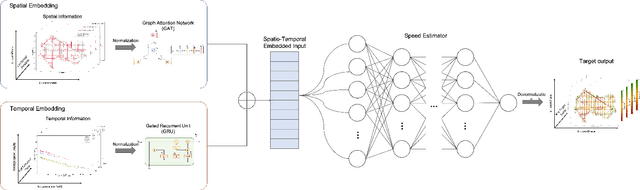
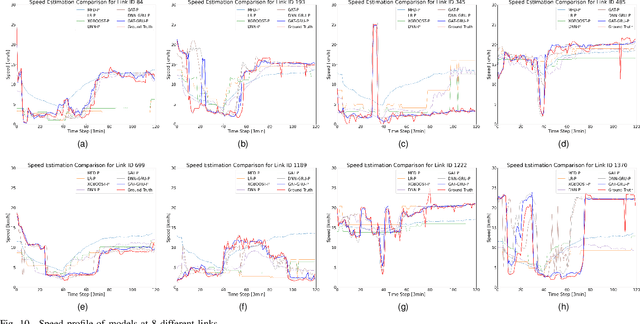
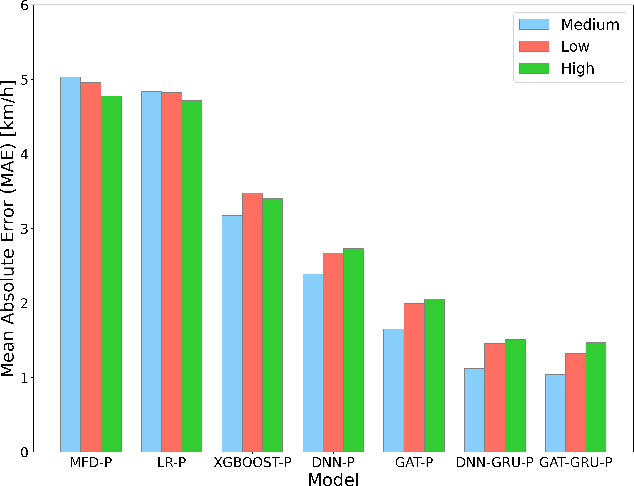
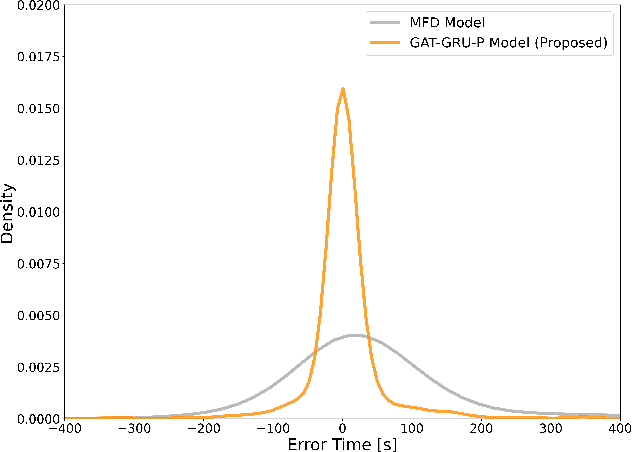
In large-scale traffic optimization, models based on Macroscopic Fundamental Diagram (MFD) are recognized for their efficiency in broad analyses. However, they fail to reflect variations in the individual traffic status of each road link, leading to a gap in detailed traffic optimization and analysis. To address the limitation, this study introduces a Local Correction Factor (LCF) that a function integrates MFD-derived network mean speed with network configurations to accurately estimate the individual speed of the link. We use a novel deep learning framework combining Graph Attention Networks (GATs) with Gated Recurrent Units (GRUs) to capture both spatial configurations and temporal dynamics of the network. Coupled with a strategic network partitioning method, our model enhances the precision of link-level traffic speed estimations while preserving the computational benefits of aggregate models. In the experiment, we evaluate the proposed LCF through various urban traffic scenarios, including different demand levels, origin-destination distributions, and road configurations. The results show the robust adaptability and effectiveness of the proposed model. Furthermore, we validate the practicality of our model by calculating the travel time of each randomly generated path, with the average error relative to MFD-based results being reduced to approximately 76%.
A Real-time Evaluation Framework for Pedestrian's Potential Risk at Non-Signalized Intersections Based on Predicted Post-Encroachment Time
Apr 24, 2024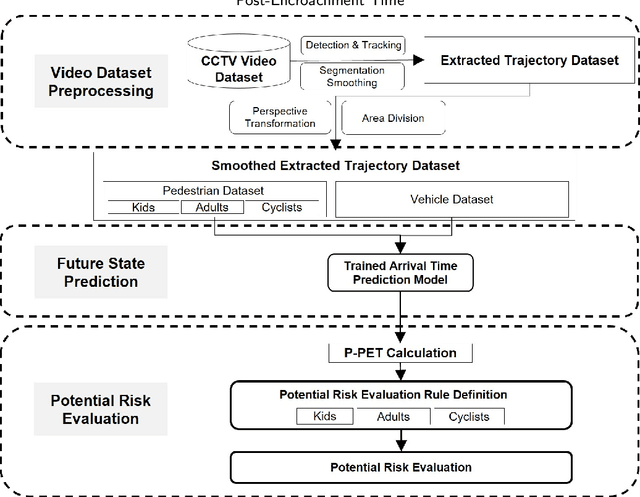
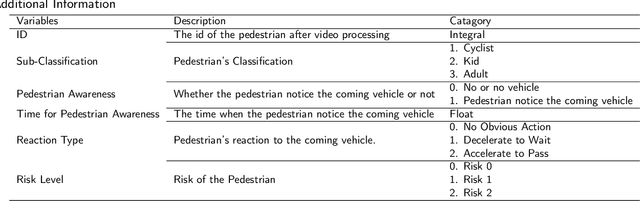
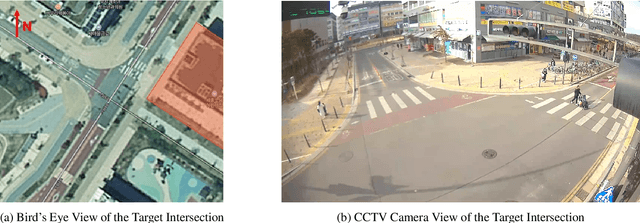

Addressing pedestrian safety at intersections is one of the paramount concerns in the field of transportation research, driven by the urgency of reducing traffic-related injuries and fatalities. With advances in computer vision technologies and predictive models, the pursuit of developing real-time proactive protection systems is increasingly recognized as vital to improving pedestrian safety at intersections. The core of these protection systems lies in the prediction-based evaluation of pedestrian's potential risks, which plays a significant role in preventing the occurrence of accidents. The major challenges in the current prediction-based potential risk evaluation research can be summarized into three aspects: the inadequate progress in creating a real-time framework for the evaluation of pedestrian's potential risks, the absence of accurate and explainable safety indicators that can represent the potential risk, and the lack of tailor-made evaluation criteria specifically for each category of pedestrians. To address these research challenges, in this study, a framework with computer vision technologies and predictive models is developed to evaluate the potential risk of pedestrians in real time. Integral to this framework is a novel surrogate safety measure, the Predicted Post-Encroachment Time (P-PET), derived from deep learning models capable to predict the arrival time of pedestrians and vehicles at intersections. To further improve the effectiveness and reliability of pedestrian risk evaluation, we classify pedestrians into distinct categories and apply specific evaluation criteria for each group. The results demonstrate the framework's ability to effectively identify potential risks through the use of P-PET, indicating its feasibility for real-time applications and its improved performance in risk evaluation across different categories of pedestrians.
A Framework for Pedestrian Sub-classification and Arrival Time Prediction at Signalized Intersection Using Preprocessed Lidar Data
Jan 15, 2022The mortality rate for pedestrians using wheelchairs was 36% higher than the overall population pedestrian mortality rate. However, there is no data to clarify the pedestrians' categories in both fatal and nonfatal accidents, since police reports often do not keep a record of whether a victim was using a wheelchair or has a disability. Currently, real-time detection of vulnerable road users using advanced traffic sensors installed at the infrastructure side has a great potential to significantly improve traffic safety at the intersection. In this research, we develop a systematic framework with a combination of machine learning and deep learning models to distinguish disabled people from normal walk pedestrians and predict the time needed to reach the next side of the intersection. The proposed framework shows high performance both at vulnerable user classification and arrival time prediction accuracy.
Transformer-based Map Matching Model with Limited Ground-Truth Data using Transfer-Learning Approach
Aug 03, 2021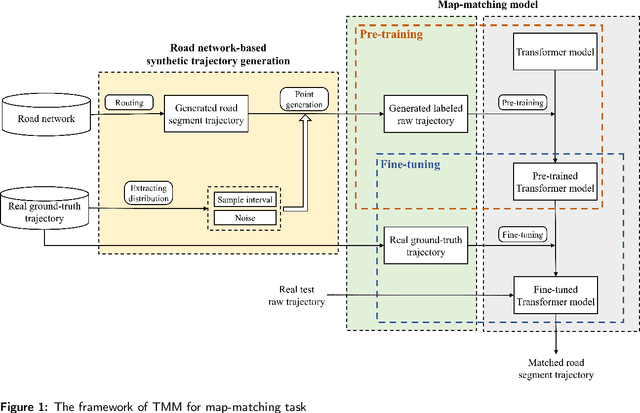
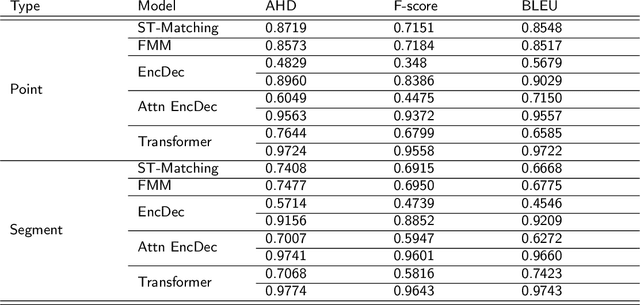
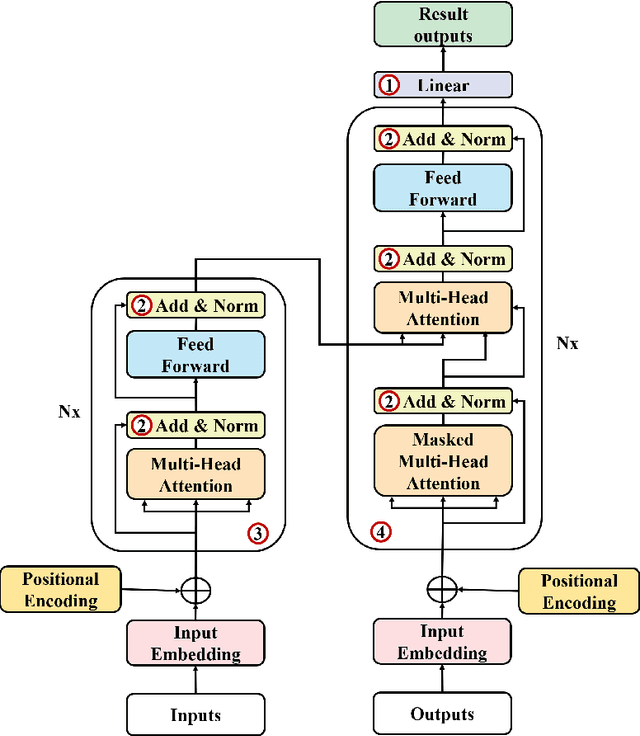
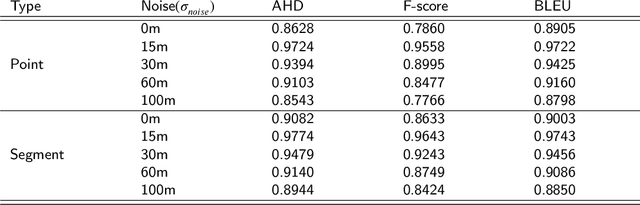
In many trajectory-based applications, it is necessary to map raw GPS trajectories onto road networks in digital maps, which is commonly referred to as a map-matching process. While most previous map-matching methods have focused on using rule-based algorithms to deal with the map-matching problems, in this paper, we consider the map-matching task from the data perspective, proposing a deep learning-based map-matching model. We build a Transformer-based map-matching model with a transfer learning approach. We generate synthetic trajectory data to pre-train the Transformer model and then fine-tune the model with a limited number of ground-truth data to minimize the model development cost and reduce the real-to-virtual gap. Three metrics (Average Hamming Distance, F-score, and BLEU) at two levels (point and segment level) are used to evaluate the model performance. The results indicate that the proposed model outperforms existing models. Furthermore, we use the attention weights of the Transformer to plot the map-matching process and find how the model matches the road segments correctly.