 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCtx2TrajGen: Traffic Context-Aware Microscale Vehicle Trajectories using Generative Adversarial Imitation Learning
Jul 23, 2025



Precise modeling of microscopic vehicle trajectories is critical for traffic behavior analysis and autonomous driving systems. We propose Ctx2TrajGen, a context-aware trajectory generation framework that synthesizes realistic urban driving behaviors using GAIL. Leveraging PPO and WGAN-GP, our model addresses nonlinear interdependencies and training instability inherent in microscopic settings. By explicitly conditioning on surrounding vehicles and road geometry, Ctx2TrajGen generates interaction-aware trajectories aligned with real-world context. Experiments on the drone-captured DRIFT dataset demonstrate superior performance over existing methods in terms of realism, behavioral diversity, and contextual fidelity, offering a robust solution to data scarcity and domain shift without simulation.
KeyRe-ID: Keypoint-Guided Person Re-Identification using Part-Aware Representation in Videos
Jul 10, 2025We propose \textbf{KeyRe-ID}, a keypoint-guided video-based person re-identification framework consisting of global and local branches that leverage human keypoints for enhanced spatiotemporal representation learning. The global branch captures holistic identity semantics through Transformer-based temporal aggregation, while the local branch dynamically segments body regions based on keypoints to generate fine-grained, part-aware features. Extensive experiments on MARS and iLIDS-VID benchmarks demonstrate state-of-the-art performance, achieving 91.73\% mAP and 97.32\% Rank-1 accuracy on MARS, and 96.00\% Rank-1 and 100.0\% Rank-5 accuracy on iLIDS-VID. The code for this work will be publicly available on GitHub upon publication.
Objectomaly: Objectness-Aware Refinement for OoD Segmentation with Structural Consistency and Boundary Precision
Jul 10, 2025



Out-of-Distribution (OoD) segmentation is critical for safety-sensitive applications like autonomous driving. However, existing mask-based methods often suffer from boundary imprecision, inconsistent anomaly scores within objects, and false positives from background noise. We propose \textbf{\textit{Objectomaly}}, an objectness-aware refinement framework that incorporates object-level priors. Objectomaly consists of three stages: (1) Coarse Anomaly Scoring (CAS) using an existing OoD backbone, (2) Objectness-Aware Score Calibration (OASC) leveraging SAM-generated instance masks for object-level score normalization, and (3) Meticulous Boundary Precision (MBP) applying Laplacian filtering and Gaussian smoothing for contour refinement. Objectomaly achieves state-of-the-art performance on key OoD segmentation benchmarks, including SMIYC AnomalyTrack/ObstacleTrack and RoadAnomaly, improving both pixel-level (AuPRC up to 96.99, FPR$_{95}$ down to 0.07) and component-level (F1$-$score up to 83.44) metrics. Ablation studies and qualitative results on real-world driving videos further validate the robustness and generalizability of our method. Code will be released upon publication.
DRIFT open dataset: A drone-derived intelligence for traffic analysis in urban environmen
Apr 15, 2025Reliable traffic data are essential for understanding urban mobility and developing effective traffic management strategies. This study introduces the DRone-derived Intelligence For Traffic analysis (DRIFT) dataset, a large-scale urban traffic dataset collected systematically from synchronized drone videos at approximately 250 meters altitude, covering nine interconnected intersections in Daejeon, South Korea. DRIFT provides high-resolution vehicle trajectories that include directional information, processed through video synchronization and orthomap alignment, resulting in a comprehensive dataset of 81,699 vehicle trajectories. Through our DRIFT dataset, researchers can simultaneously analyze traffic at multiple scales - from individual vehicle maneuvers like lane-changes and safety metrics such as time-to-collision to aggregate network flow dynamics across interconnected urban intersections. The DRIFT dataset is structured to enable immediate use without additional preprocessing, complemented by open-source models for object detection and trajectory extraction, as well as associated analytical tools. DRIFT is expected to significantly contribute to academic research and practical applications, such as traffic flow analysis and simulation studies. The dataset and related resources are publicly accessible at https://github.com/AIxMobility/The-DRIFT.
FLAMe: Federated Learning with Attention Mechanism using Spatio-Temporal Keypoint Transformers for Pedestrian Fall Detection in Smart Cities
Dec 19, 2024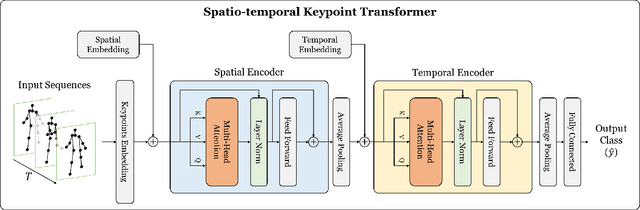
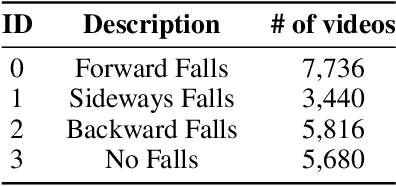
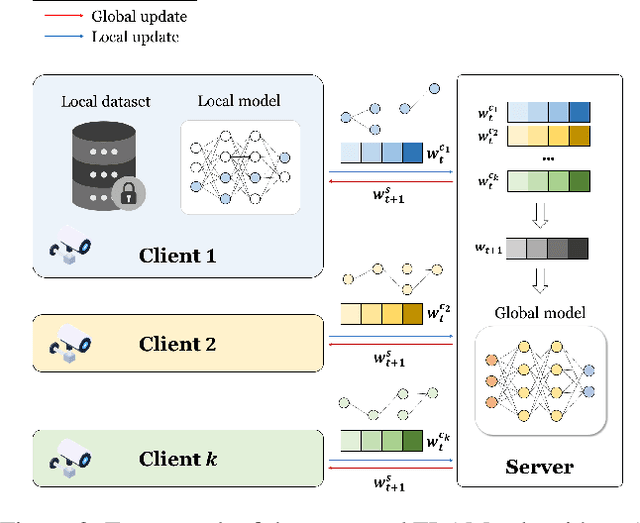
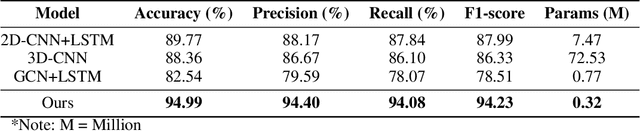
In smart cities, detecting pedestrian falls is a major challenge to ensure the safety and quality of life of citizens. In this study, we propose a novel fall detection system using FLAMe (Federated Learning with Attention Mechanism), a federated learning (FL) based algorithm. FLAMe trains around important keypoint information and only transmits the trained important weights to the server, reducing communication costs and preserving data privacy. Furthermore, the lightweight keypoint transformer model is integrated into the FL framework to effectively learn spatio-temporal features. We validated the experiment using 22,672 video samples from the "Fall Accident Risk Behavior Video-Sensor Pair data" dataset from AI-Hub. As a result of the experiment, the FLAMe-based system achieved an accuracy of 94.02% with about 190,000 transmission parameters, maintaining performance similar to that of existing centralized learning while maximizing efficiency by reducing communication costs by about 40% compared to the existing FL algorithm, FedAvg. Therefore, the FLAMe algorithm has demonstrated that it provides robust performance in the distributed environment of smart cities and is a practical and effective solution for public safety.
Identifying the exterior image of buildings on a 3D map and extracting elevation information using deep learning and digital image processing
Jan 04, 2022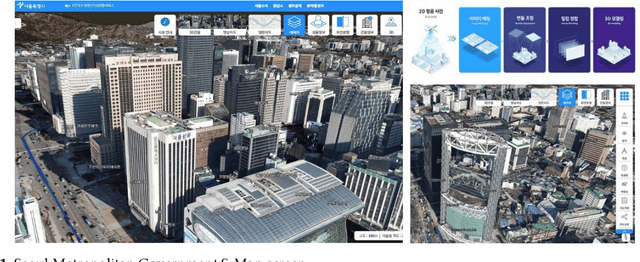
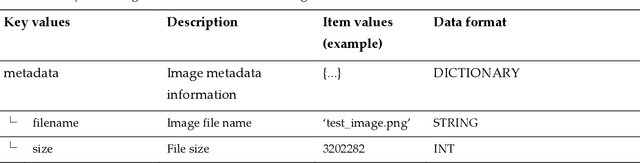
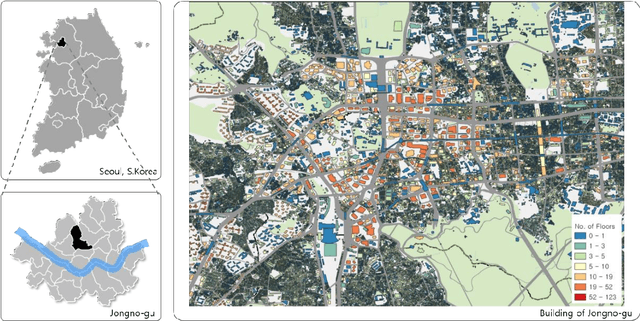
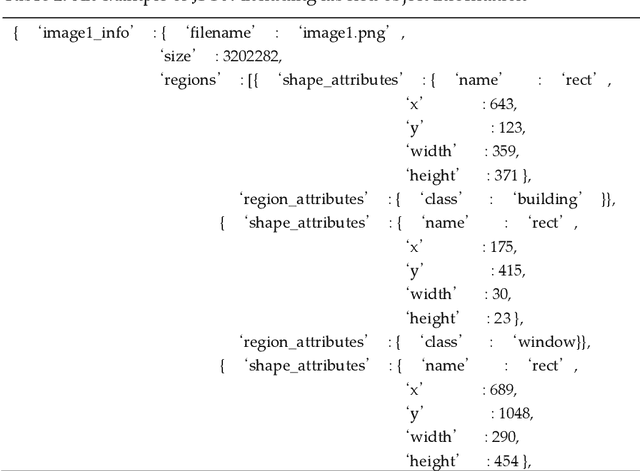
Despite the fact that architectural administration information in Korea has been providing high-quality information for a long period of time, the level of utility of the information is not high because it focuses on administrative information. While this is the case, a three-dimensional (3D) map with higher resolution has emerged along with the technological development. However, it cannot function better than visual transmission, as it includes only image information focusing on the exterior of the building. If information related to the exterior of the building can be extracted or identified from a 3D map, it is expected that the utility of the information will be more valuable as the national architectural administration information can then potentially be extended to include such information regarding the building exteriors to the level of BIM(Building Information Modeling). This study aims to present and assess a basic method of extracting information related to the appearance of the exterior of a building for the purpose of 3D mapping using deep learning and digital image processing. After extracting and preprocessing images from the map, information was identified using the Fast R-CNN(Regions with Convolutional Neuron Networks) model. The information was identified using the Faster R-CNN model after extracting and preprocessing images from the map. As a result, it showed approximately 93% and 91% accuracy in terms of detecting the elevation and window parts of the building, respectively, as well as excellent performance in an experiment aimed at extracting the elevation information of the building. Nonetheless, it is expected that improved results will be obtained by supplementing the probability of mixing the false detection rate or noise data caused by the misunderstanding of experimenters in relation to the unclear boundaries of windows.
Analyzing vehicle pedestrian interactions combining data cube structure and predictive collision risk estimation model
Jul 26, 2021
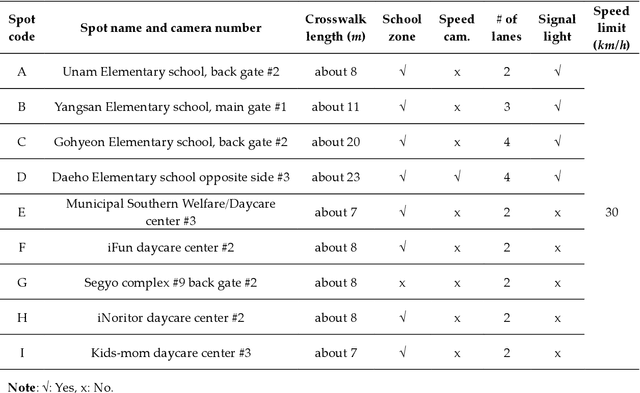
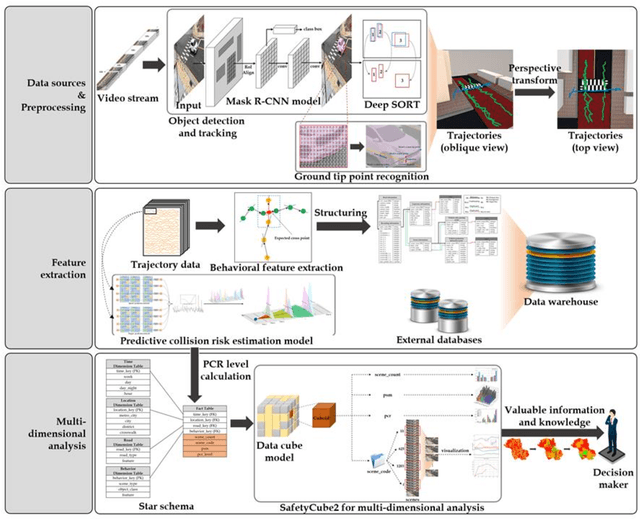
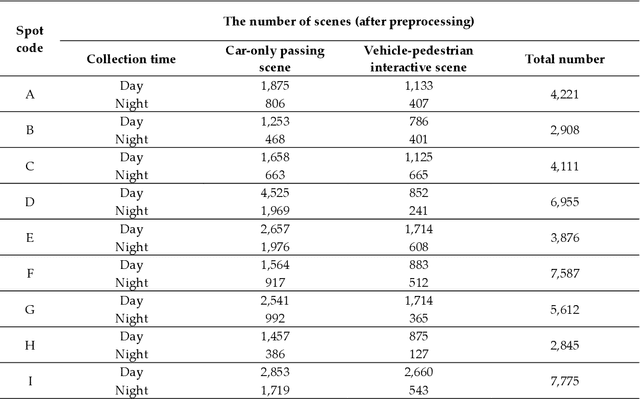
Traffic accidents are a threat to human lives, particularly pedestrians causing premature deaths. Therefore, it is necessary to devise systems to prevent accidents in advance and respond proactively, using potential risky situations as one of the surrogate safety measurements. This study introduces a new concept of a pedestrian safety system that combines the field and the centralized processes. The system can warn of upcoming risks immediately in the field and improve the safety of risk frequent areas by assessing the safety levels of roads without actual collisions. In particular, this study focuses on the latter by introducing a new analytical framework for a crosswalk safety assessment with behaviors of vehicle/pedestrian and environmental features. We obtain these behavioral features from actual traffic video footage in the city with complete automatic processing. The proposed framework mainly analyzes these behaviors in multidimensional perspectives by constructing a data cube structure, which combines the LSTM based predictive collision risk estimation model and the on line analytical processing operations. From the PCR estimation model, we categorize the severity of risks as four levels and apply the proposed framework to assess the crosswalk safety with behavioral features. Our analytic experiments are based on two scenarios, and the various descriptive results are harvested the movement patterns of vehicles and pedestrians by road environment and the relationships between risk levels and car speeds. Thus, the proposed framework can support decision makers by providing valuable information to improve pedestrian safety for future accidents, and it can help us better understand their behaviors near crosswalks proactively. In order to confirm the feasibility and applicability of the proposed framework, we implement and apply it to actual operating CCTVs in Osan City, Korea.
Automated Object Behavioral Feature Extraction for Potential Risk Analysis based on Video Sensor
Jul 08, 2021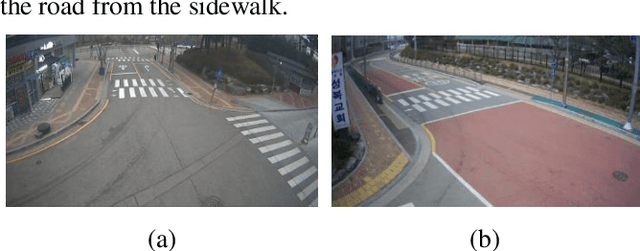
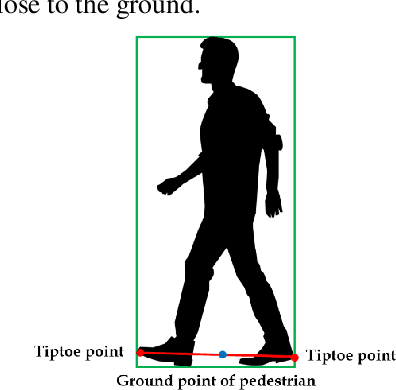
Pedestrians are exposed to risk of death or serious injuries on roads, especially unsignalized crosswalks, for a variety of reasons. To date, an extensive variety of studies have reported on vision based traffic safety system. However, many studies required manual inspection of the volumes of traffic video to reliably obtain traffic related objects behavioral factors. In this paper, we propose an automated and simpler system for effectively extracting object behavioral features from video sensors deployed on the road. We conduct basic statistical analysis on these features, and show how they can be useful for monitoring the traffic behavior on the road. We confirm the feasibility of the proposed system by applying our prototype to two unsignalized crosswalks in Osan city, South Korea. To conclude, we compare behaviors of vehicles and pedestrians in those two areas by simple statistical analysis. This study demonstrates the potential for a network of connected video sensors to provide actionable data for smart cities to improve pedestrian safety in dangerous road environments.
Vision based Pedestrian Potential Risk Analysis based on Automated Behavior Feature Extraction for Smart and Safe City
May 27, 2021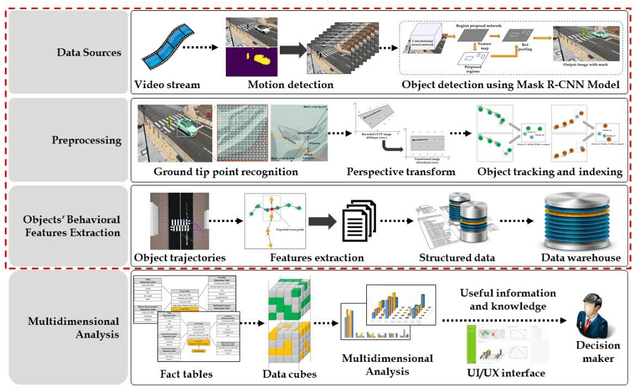
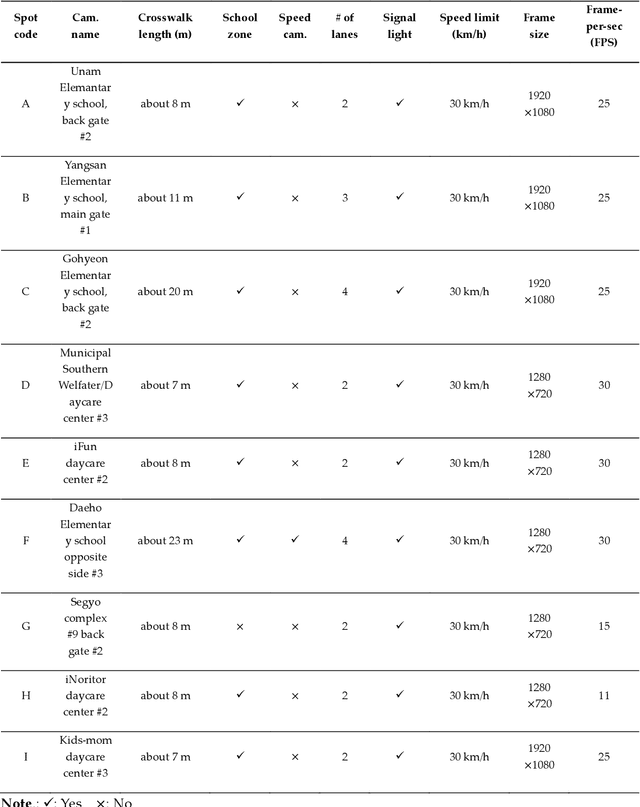
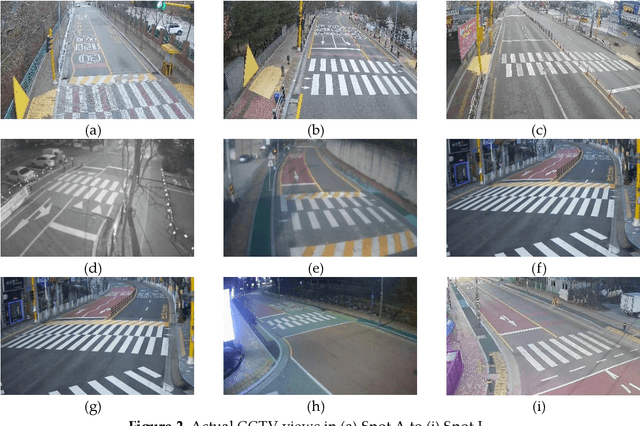
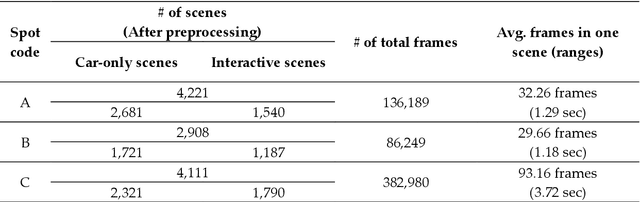
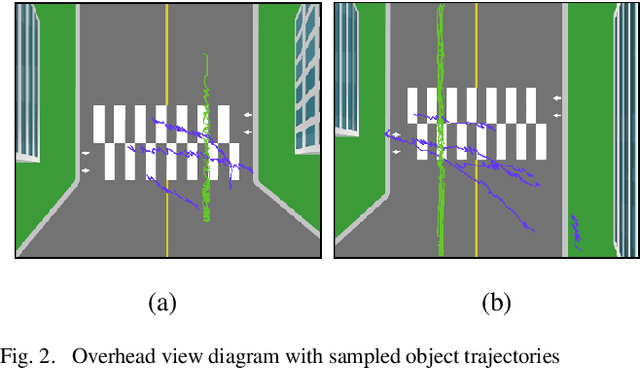
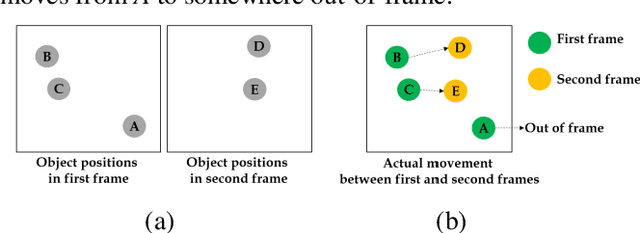
Despite recent advances in vehicle safety technologies, road traffic accidents still pose a severe threat to human lives and have become a leading cause of premature deaths. In particular, crosswalks present a major threat to pedestrians, but we lack dense behavioral data to investigate the risks they face. Therefore, we propose a comprehensive analytical model for pedestrian potential risk using video footage gathered by road security cameras deployed at such crossings. The proposed system automatically detects vehicles and pedestrians, calculates trajectories by frames, and extracts behavioral features affecting the likelihood of potentially dangerous scenes between these objects. Finally, we design a data cube model by using the large amount of the extracted features accumulated in a data warehouse to perform multidimensional analysis for potential risk scenes with levels of abstraction, but this is beyond the scope of this paper, and will be detailed in a future study. In our experiment, we focused on extracting the various behavioral features from multiple crosswalks, and visualizing and interpreting their behaviors and relationships among them by camera location to show how they may or may not contribute to potential risk. We validated feasibility and applicability by applying it in multiple crosswalks in Osan city, Korea.
A novel method of predictive collision risk area estimation for proactive pedestrian accident prevention system in urban surveillance infrastructure
May 06, 2021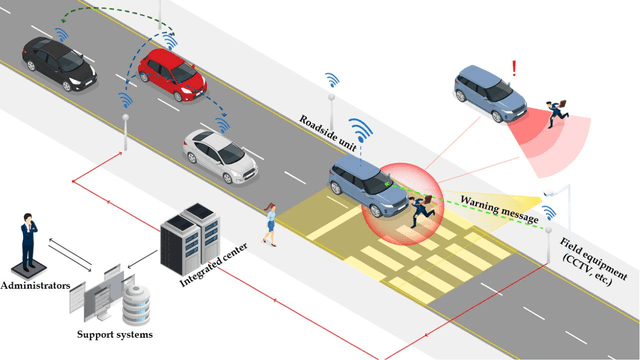
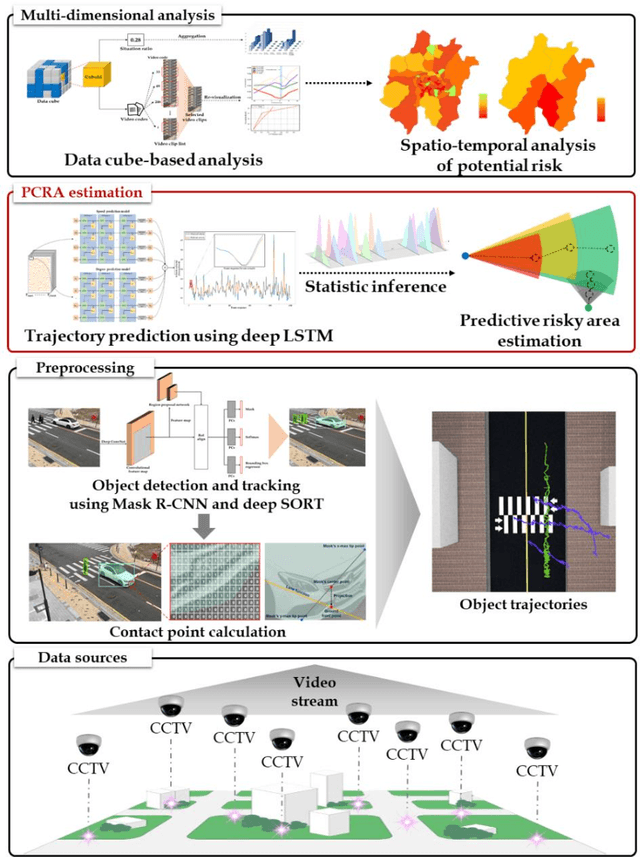

Road traffic accidents, especially vehicle pedestrian collisions in crosswalk, globally pose a severe threat to human lives and have become a leading cause of premature deaths. In order to protect such vulnerable road users from collisions, it is necessary to recognize possible conflict in advance and warn to road users, not post facto. A breakthrough for proactively preventing pedestrian collisions is to recognize pedestrian's potential risks based on vision sensors such as CCTVs. In this study, we propose a predictive collision risk area estimation system at unsignalized crosswalks. The proposed system applied trajectories of vehicles and pedestrians from video footage after preprocessing, and then predicted their trajectories by using deep LSTM networks. With use of predicted trajectories, this system can infer collision risk areas statistically, further severity of levels is divided as danger, warning, and relative safe. In order to validate the feasibility and applicability of the proposed system, we applied it and assess the severity of potential risks in two unsignalized spots in Osan city, Korea.