 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer-based Map Matching Model with Limited Ground-Truth Data using Transfer-Learning Approach
Paper and Code
Aug 03, 2021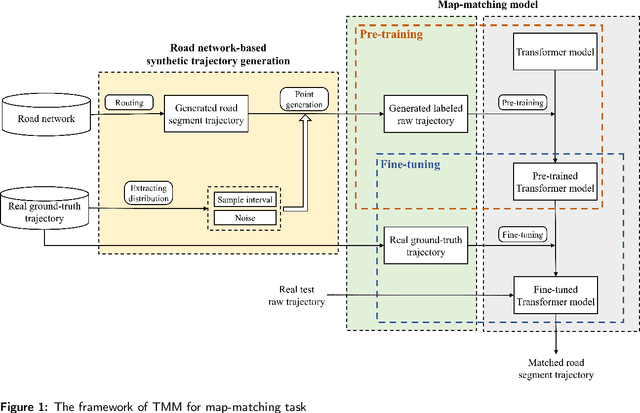
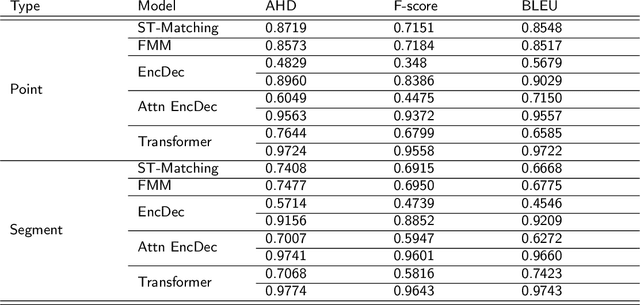
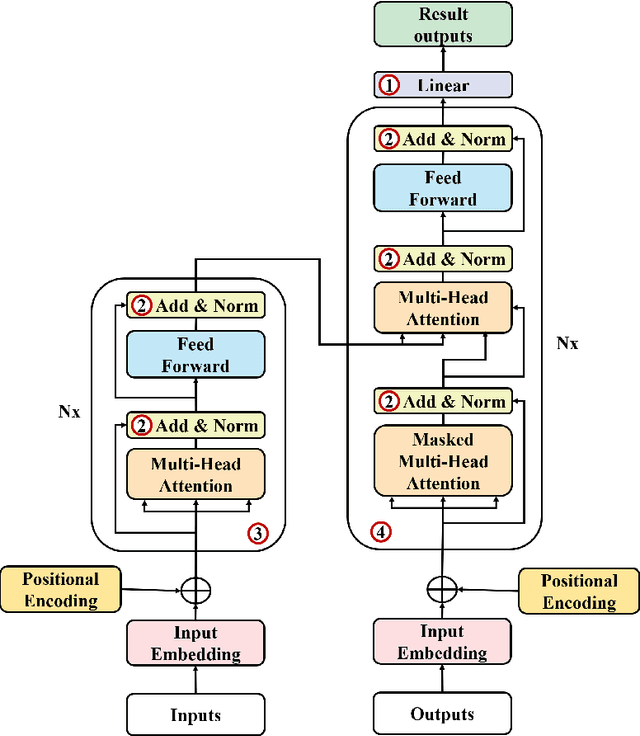
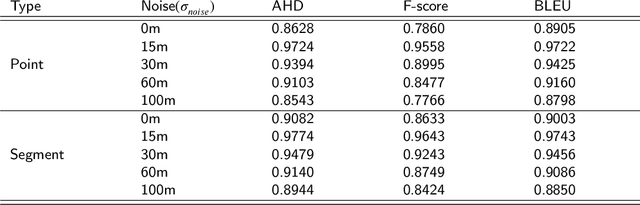
In many trajectory-based applications, it is necessary to map raw GPS trajectories onto road networks in digital maps, which is commonly referred to as a map-matching process. While most previous map-matching methods have focused on using rule-based algorithms to deal with the map-matching problems, in this paper, we consider the map-matching task from the data perspective, proposing a deep learning-based map-matching model. We build a Transformer-based map-matching model with a transfer learning approach. We generate synthetic trajectory data to pre-train the Transformer model and then fine-tune the model with a limited number of ground-truth data to minimize the model development cost and reduce the real-to-virtual gap. Three metrics (Average Hamming Distance, F-score, and BLEU) at two levels (point and segment level) are used to evaluate the model performance. The results indicate that the proposed model outperforms existing models. Furthermore, we use the attention weights of the Transformer to plot the map-matching process and find how the model matches the road segments correctly.