 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Source Urban Traffic Flow Forecasting with Drone and Loop Detector Data
Jan 07, 2025



Traffic forecasting is a fundamental task in transportation research, however the scope of current research has mainly focused on a single data modality of loop detectors. Recently, the advances in Artificial Intelligence and drone technologies have made possible novel solutions for efficient, accurate and flexible aerial observations of urban traffic. As a promising traffic monitoring approach, drone-captured data can create an accurate multi-sensor mobility observatory for large-scale urban networks, when combined with existing infrastructure. Therefore, this paper investigates the problem of multi-source traffic speed prediction, simultaneously using drone and loop detector data. A simple yet effective graph-based model HiMSNet is proposed to integrate multiple data modalities and learn spatio-temporal correlations. Detailed analysis shows that predicting accurate segment-level speed is more challenging than the regional speed, especially under high-demand scenarios with heavier congestions and varying traffic dynamics. Utilizing both drone and loop detector data, the prediction accuracy can be improved compared to single-modality cases, when the sensors have lower coverages and are subject to noise. Our simulation study based on vehicle trajectories in a real urban road network has highlighted the added value of integrating drones in traffic forecasting and monitoring.
Advanced computer vision for extracting georeferenced vehicle trajectories from drone imagery
Nov 04, 2024
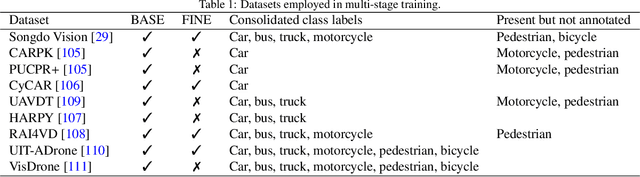
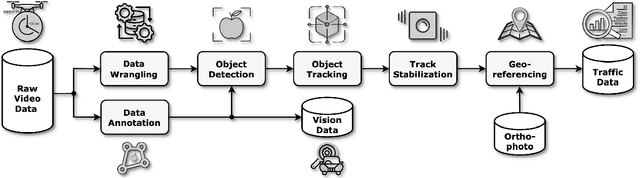
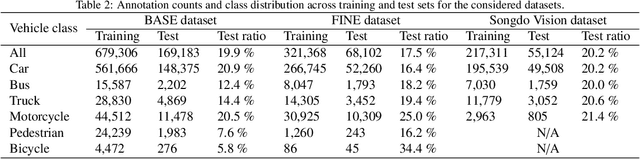
This paper presents a framework for extracting georeferenced vehicle trajectories from high-altitude drone footage, addressing key challenges in urban traffic monitoring and limitations of traditional ground-based systems. We employ state-of-the-art computer vision and deep learning to create an end-to-end pipeline that enhances vehicle detection, tracking, and trajectory stabilization. Conducted in the Songdo International Business District, South Korea, the study used a multi-drone experiment over 20 intersections, capturing approximately 12TB of 4K video data over four days. We developed a novel track stabilization method that uses detected vehicle bounding boxes as exclusion masks during image registration, which, combined with advanced georeferencing techniques, accurately transforms vehicle coordinates into real-world geographical data. Additionally, our framework includes robust vehicle dimension estimation and detailed road segmentation for in-depth traffic analysis. The framework produced two high-quality datasets: the Songdo Traffic dataset, comprising nearly 1 million unique vehicle trajectories, and the Songdo Vision dataset, containing over 5,000 human-annotated frames with about 300,000 vehicle instances in four classes. Comparisons between drone-derived data and high-precision sensor data from an instrumented probe vehicle highlight the accuracy and consistency of our framework's extraction in dense urban settings. By publicly releasing these datasets and the pipeline source code, this work sets new benchmarks for data quality, reproducibility, and scalability in traffic research. Results demonstrate the potential of integrating drone technology with advanced computer vision for precise, cost-effective urban traffic monitoring, providing valuable resources for the research community to develop intelligent transportation systems and improve traffic management strategies.
Deep Learning Methods for Adjusting Global MFD Speed Estimations to Local Link Configurations
May 23, 2024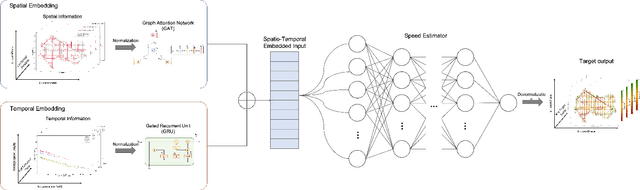
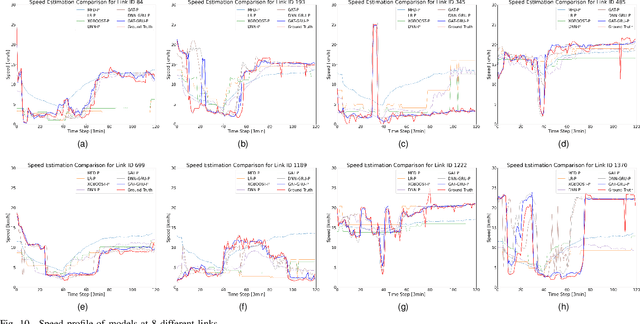
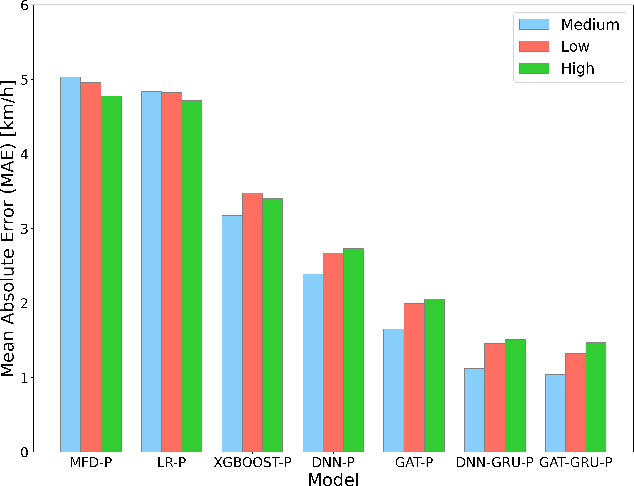
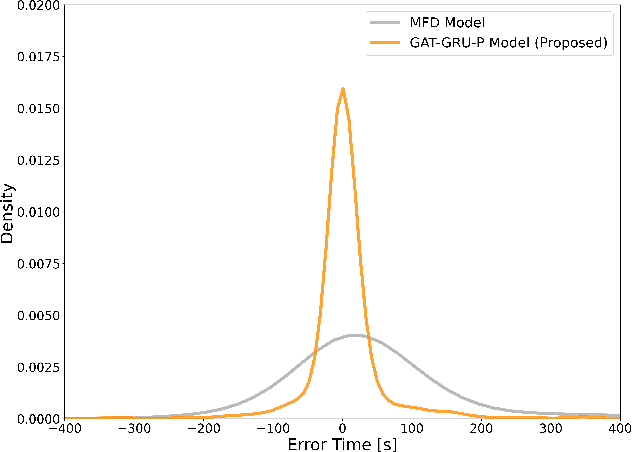
In large-scale traffic optimization, models based on Macroscopic Fundamental Diagram (MFD) are recognized for their efficiency in broad analyses. However, they fail to reflect variations in the individual traffic status of each road link, leading to a gap in detailed traffic optimization and analysis. To address the limitation, this study introduces a Local Correction Factor (LCF) that a function integrates MFD-derived network mean speed with network configurations to accurately estimate the individual speed of the link. We use a novel deep learning framework combining Graph Attention Networks (GATs) with Gated Recurrent Units (GRUs) to capture both spatial configurations and temporal dynamics of the network. Coupled with a strategic network partitioning method, our model enhances the precision of link-level traffic speed estimations while preserving the computational benefits of aggregate models. In the experiment, we evaluate the proposed LCF through various urban traffic scenarios, including different demand levels, origin-destination distributions, and road configurations. The results show the robust adaptability and effectiveness of the proposed model. Furthermore, we validate the practicality of our model by calculating the travel time of each randomly generated path, with the average error relative to MFD-based results being reduced to approximately 76%.
Predicting traffic signals on transportation networks using spatio-temporal correlations on graphs
Apr 27, 2021
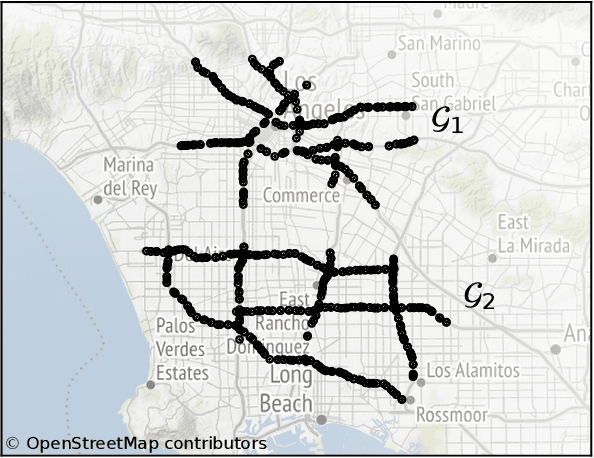
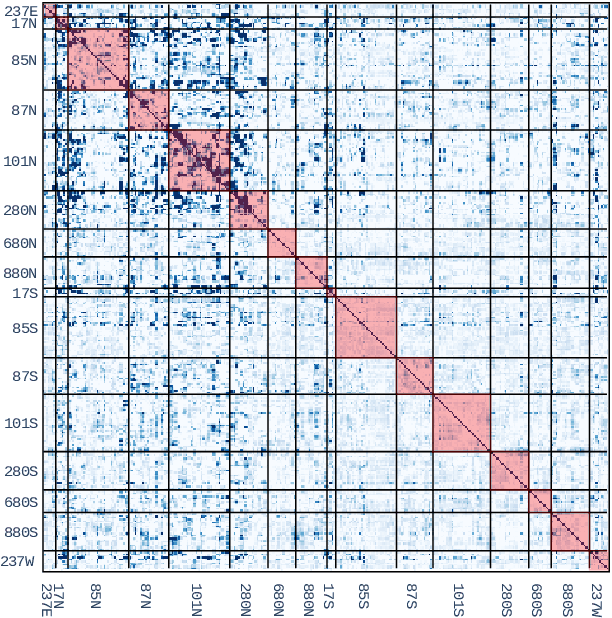
Forecasting multivariate time series is challenging as the variables are intertwined in time and space, like in the case of traffic signals. Defining signals on graphs relaxes such complexities by representing the evolution of signals over a space using relevant graph kernels such as the heat diffusion kernel. However, this kernel alone does not fully capture the actual dynamics of the data as it only relies on the graph structure. The gap can be filled by combining the graph kernel representation with data-driven models that utilize historical data. This paper proposes a traffic propagation model that merges multiple heat diffusion kernels into a data-driven prediction model to forecast traffic signals. We optimize the model parameters using Bayesian inference to minimize the prediction errors and, consequently, determine the mixing ratio of the two approaches. Such mixing ratio strongly depends on training data size and data anomalies, which typically correspond to the peak hours for traffic data. The proposed model demonstrates prediction accuracy comparable to that of the state-of-the-art deep neural networks with lower computational effort. It particularly shows excellent performance for long-term prediction since it inherits the data-driven models' periodicity modeling.
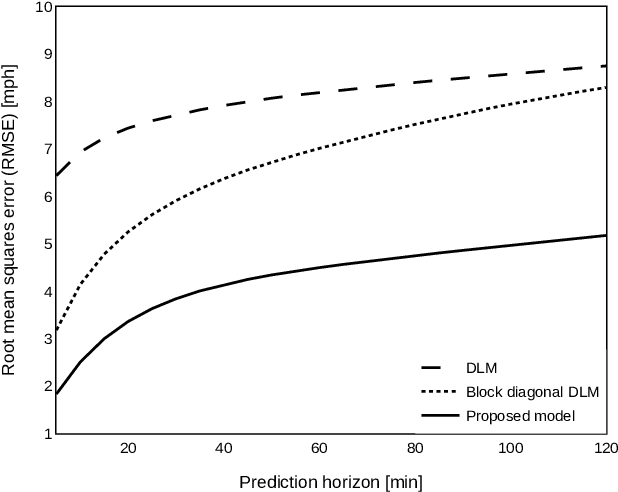
Travel time prediction for congested freeways with a dynamic linear model
Sep 02, 2020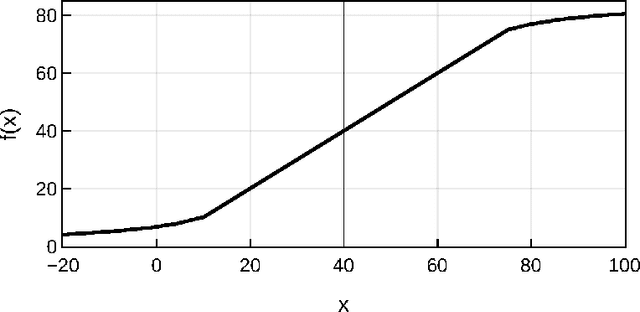
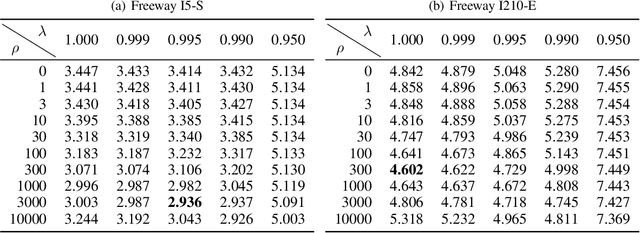
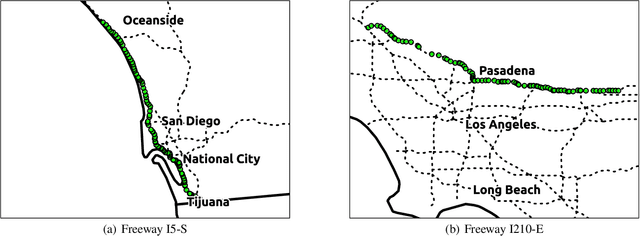
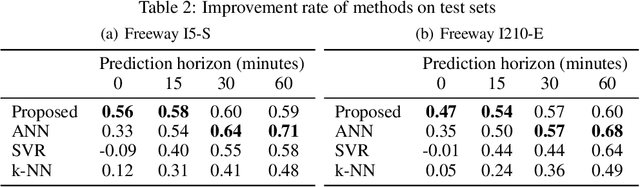
Accurate prediction of travel time is an essential feature to support Intelligent Transportation Systems (ITS). The non-linearity of traffic states, however, makes this prediction a challenging task. Here we propose to use dynamic linear models (DLMs) to approximate the non-linear traffic states. Unlike a static linear regression model, the DLMs assume that their parameters are changing across time. We design a DLM with model parameters defined at each time unit to describe the spatio-temporal characteristics of time-series traffic data. Based on our DLM and its model parameters analytically trained using historical data, we suggest an optimal linear predictor in the minimum mean square error (MMSE) sense. We compare our prediction accuracy of travel time for freeways in California (I210-E and I5-S) under highly congested traffic conditions with those of other methods: the instantaneous travel time, k-nearest neighbor, support vector regression, and artificial neural network. We show significant improvements in the accuracy, especially for short-term prediction.