 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced computer vision for extracting georeferenced vehicle trajectories from drone imagery
Paper and Code
Nov 04, 2024
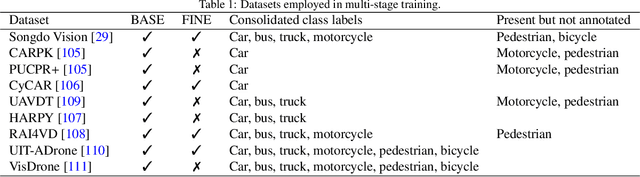
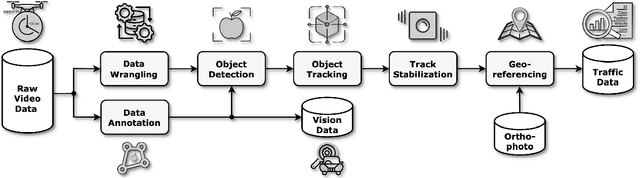
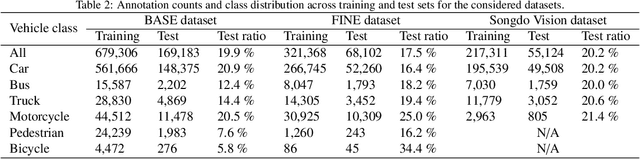
This paper presents a framework for extracting georeferenced vehicle trajectories from high-altitude drone footage, addressing key challenges in urban traffic monitoring and limitations of traditional ground-based systems. We employ state-of-the-art computer vision and deep learning to create an end-to-end pipeline that enhances vehicle detection, tracking, and trajectory stabilization. Conducted in the Songdo International Business District, South Korea, the study used a multi-drone experiment over 20 intersections, capturing approximately 12TB of 4K video data over four days. We developed a novel track stabilization method that uses detected vehicle bounding boxes as exclusion masks during image registration, which, combined with advanced georeferencing techniques, accurately transforms vehicle coordinates into real-world geographical data. Additionally, our framework includes robust vehicle dimension estimation and detailed road segmentation for in-depth traffic analysis. The framework produced two high-quality datasets: the Songdo Traffic dataset, comprising nearly 1 million unique vehicle trajectories, and the Songdo Vision dataset, containing over 5,000 human-annotated frames with about 300,000 vehicle instances in four classes. Comparisons between drone-derived data and high-precision sensor data from an instrumented probe vehicle highlight the accuracy and consistency of our framework's extraction in dense urban settings. By publicly releasing these datasets and the pipeline source code, this work sets new benchmarks for data quality, reproducibility, and scalability in traffic research. Results demonstrate the potential of integrating drone technology with advanced computer vision for precise, cost-effective urban traffic monitoring, providing valuable resources for the research community to develop intelligent transportation systems and improve traffic management strategies.