 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreen Video Camouflaged Object Detection
Jan 19, 2025Camouflaged object detection (COD) aims to distinguish hidden objects embedded in an environment highly similar to the object. Conventional video-based COD (VCOD) methods explicitly extract motion cues or employ complex deep learning networks to handle the temporal information, which is limited by high complexity and unstable performance. In this work, we propose a green VCOD method named GreenVCOD. Built upon a green ICOD method, GreenVCOD uses long- and short-term temporal neighborhoods (TN) to capture joint spatial/temporal context information for decision refinement. Experimental results show that GreenVCOD offers competitive performance compared to state-of-the-art VCOD benchmarks.
Unsupervised Green Object Tracker (GOT) without Offline Pre-training
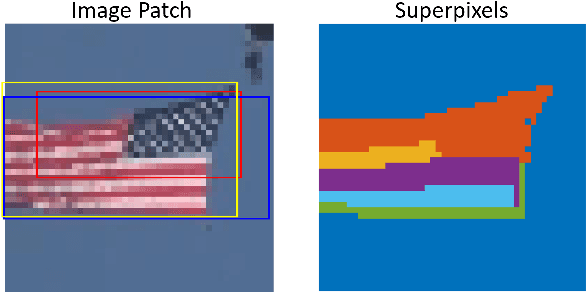
Sep 16, 2023Supervised trackers trained on labeled data dominate the single object tracking field for superior tracking accuracy. The labeling cost and the huge computational complexity hinder their applications on edge devices. Unsupervised learning methods have also been investigated to reduce the labeling cost but their complexity remains high. Aiming at lightweight high-performance tracking, feasibility without offline pre-training, and algorithmic transparency, we propose a new single object tracking method, called the green object tracker (GOT), in this work. GOT conducts an ensemble of three prediction branches for robust box tracking: 1) a global object-based correlator to predict the object location roughly, 2) a local patch-based correlator to build temporal correlations of small spatial units, and 3) a superpixel-based segmentator to exploit the spatial information of the target frame. GOT offers competitive tracking accuracy with state-of-the-art unsupervised trackers, which demand heavy offline pre-training, at a lower computation cost. GOT has a tiny model size (<3k parameters) and low inference complexity (around 58M FLOPs per frame). Since its inference complexity is between 0.1%-10% of DL trackers, it can be easily deployed on mobile and edge devices.
GUSOT: Green and Unsupervised Single Object Tracking for Long Video Sequences
Jul 15, 2022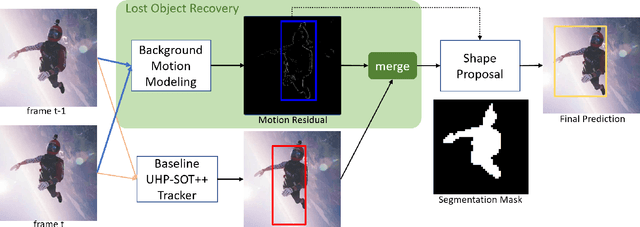
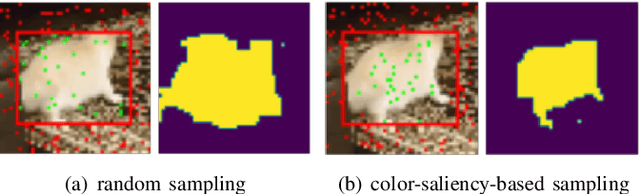
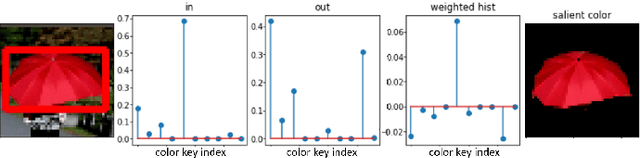
Supervised and unsupervised deep trackers that rely on deep learning technologies are popular in recent years. Yet, they demand high computational complexity and a high memory cost. A green unsupervised single-object tracker, called GUSOT, that aims at object tracking for long videos under a resource-constrained environment is proposed in this work. Built upon a baseline tracker, UHP-SOT++, which works well for short-term tracking, GUSOT contains two additional new modules: 1) lost object recovery, and 2) color-saliency-based shape proposal. They help resolve the tracking loss problem and offer a more flexible object proposal, respectively. Thus, they enable GUSOT to achieve higher tracking accuracy in the long run. We conduct experiments on the large-scale dataset LaSOT with long video sequences, and show that GUSOT offers a lightweight high-performance tracking solution that finds applications in mobile and edge computing platforms.
Unsupervised Lightweight Single Object Tracking with UHP-SOT++
Nov 15, 2021



An unsupervised, lightweight and high-performance single object tracker, called UHP-SOT, was proposed by Zhou et al. recently. As an extension, we present an enhanced version and name it UHP-SOT++ in this work. Built upon the foundation of the discriminative-correlation-filters-based (DCF-based) tracker, two new ingredients are introduced in UHP-SOT and UHP-SOT++: 1) background motion modeling and 2) object box trajectory modeling. The main difference between UHP-SOT and UHP-SOT++ is the fusion strategy of proposals from three models (i.e., DCF, background motion and object box trajectory models). An improved fusion strategy is adopted by UHP-SOT++ for more robust tracking performance against large-scale tracking datasets. Our second contribution lies in an extensive evaluation of the performance of state-of-the-art supervised and unsupervised methods by testing them on four SOT benchmark datasets - OTB2015, TC128, UAV123 and LaSOT. Experiments show that UHP-SOT++ outperforms all previous unsupervised methods and several deep-learning (DL) methods in tracking accuracy. Since UHP-SOT++ has extremely small model size, high tracking performance, and low computational complexity (operating at a rate of 20 FPS on an i5 CPU even without code optimization), it is an ideal solution in real-time object tracking on resource-limited platforms. Based on the experimental results, we compare pros and cons of supervised and unsupervised trackers and provide a new perspective to understand the performance gap between supervised and unsupervised methods, which is the third contribution of this work.
UHP-SOT: An Unsupervised High-Performance Single Object Tracker
Oct 05, 2021



An unsupervised online object tracking method that exploits both foreground and background correlations is proposed and named UHP-SOT (Unsupervised High-Performance Single Object Tracker) in this work. UHP-SOT consists of three modules: 1) appearance model update, 2) background motion modeling, and 3) trajectory-based box prediction. A state-of-the-art discriminative correlation filters (DCF) based tracker is adopted by UHP-SOT as the first module. We point out shortcomings of using the first module alone such as failure in recovering from tracking loss and inflexibility in object box adaptation and then propose the second and third modules to overcome them. Both are novel in single object tracking (SOT). We test UHP-SOT on two popular object tracking benchmarks, TB-50 and TB-100, and show that it outperforms all previous unsupervised SOT methods, achieves a performance comparable with the best supervised deep-learning-based SOT methods, and operates at a fast speed (i.e. 22.7-32.0 FPS on a CPU).
From Two-Class Linear Discriminant Analysis to Interpretable Multilayer Perceptron Design
Sep 09, 2020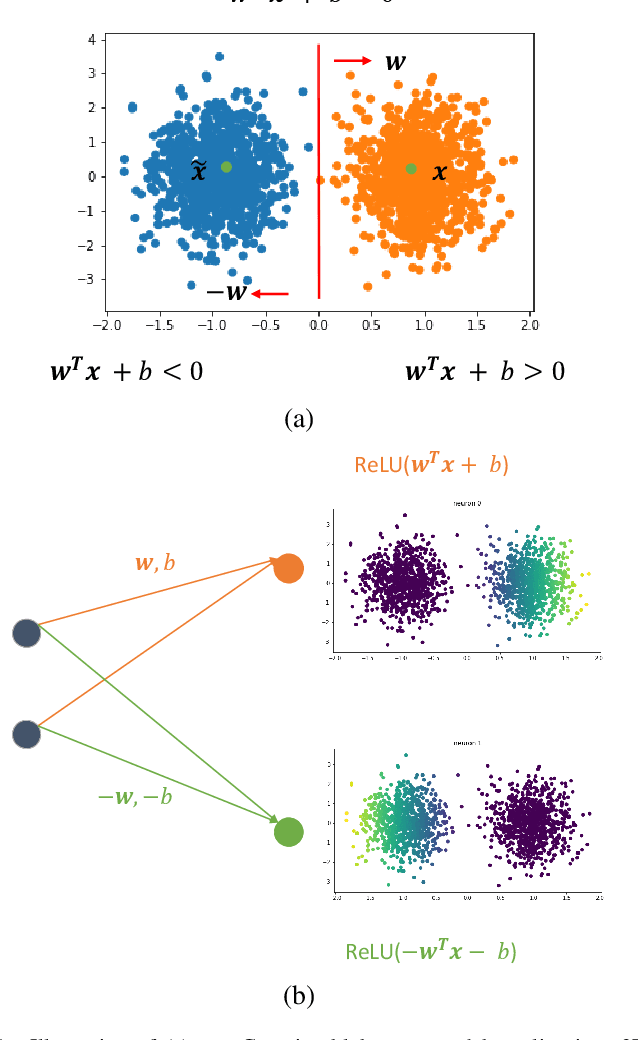
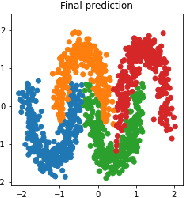
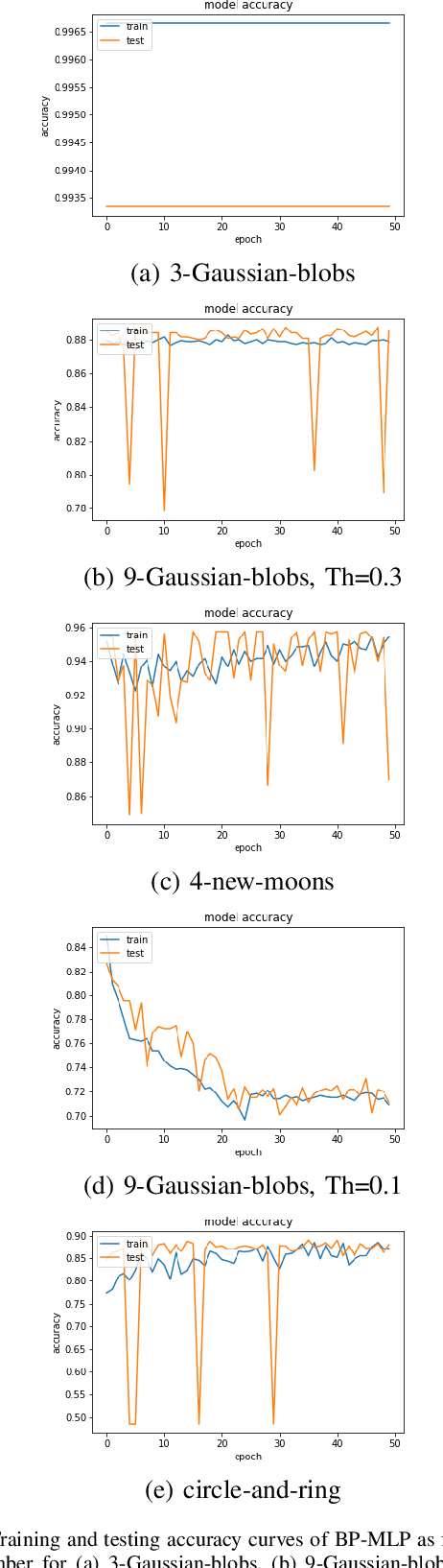
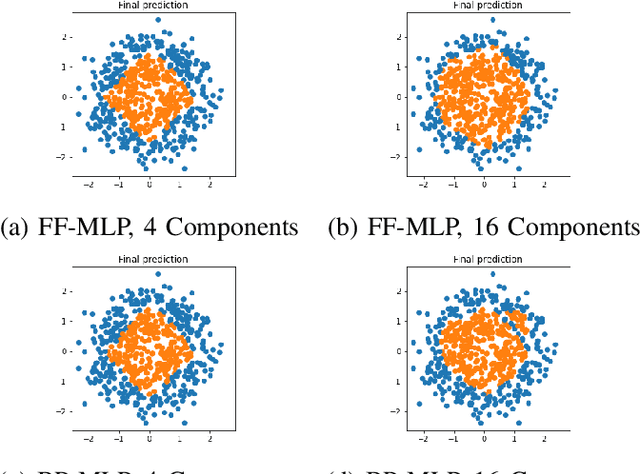
A closed-form solution exists in two-class linear discriminant analysis (LDA), which discriminates two Gaussian-distributed classes in a multi-dimensional feature space. In this work, we interpret the multilayer perceptron (MLP) as a generalization of a two-class LDA system so that it can handle an input composed by multiple Gaussian modalities belonging to multiple classes. Besides input layer $l_{in}$ and output layer $l_{out}$, the MLP of interest consists of two intermediate layers, $l_1$ and $l_2$. We propose a feedforward design that has three stages: 1) from $l_{in}$ to $l_1$: half-space partitionings accomplished by multiple parallel LDAs, 2) from $l_1$ to $l_2$: subspace isolation where one Gaussian modality is represented by one neuron, 3) from $l_2$ to $l_{out}$: class-wise subspace mergence, where each Gaussian modality is connected to its target class. Through this process, we present an automatic MLP design that can specify the network architecture (i.e., the layer number and the neuron number at a layer) and all filter weights in a feedforward one-pass fashion. This design can be generalized to an arbitrary distribution by leveraging the Gaussian mixture model (GMM). Experiments are conducted to compare the performance of the traditional backpropagation-based MLP (BP-MLP) and the new feedforward MLP (FF-MLP).