 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFairDiverse: A Comprehensive Toolkit for Fair and Diverse Information Retrieval Algorithms
Feb 17, 2025In modern information retrieval (IR). achieving more than just accuracy is essential to sustaining a healthy ecosystem, especially when addressing fairness and diversity considerations. To meet these needs, various datasets, algorithms, and evaluation frameworks have been introduced. However, these algorithms are often tested across diverse metrics, datasets, and experimental setups, leading to inconsistencies and difficulties in direct comparisons. This highlights the need for a comprehensive IR toolkit that enables standardized evaluation of fairness- and diversity-aware algorithms across different IR tasks. To address this challenge, we present FairDiverse, an open-source and standardized toolkit. FairDiverse offers a framework for integrating fair and diverse methods, including pre-processing, in-processing, and post-processing techniques, at different stages of the IR pipeline. The toolkit supports the evaluation of 28 fairness and diversity algorithms across 16 base models, covering two core IR tasks (search and recommendation) thereby establishing a comprehensive benchmark. Moreover, FairDiverse is highly extensible, providing multiple APIs that empower IR researchers to swiftly develop and evaluate their own fairness and diversity aware models, while ensuring fair comparisons with existing baselines. The project is open-sourced and available on https://github.com/XuChen0427/FairDiverse.
From Novice to Expert: LLM Agent Policy Optimization via Step-wise Reinforcement Learning
Nov 06, 2024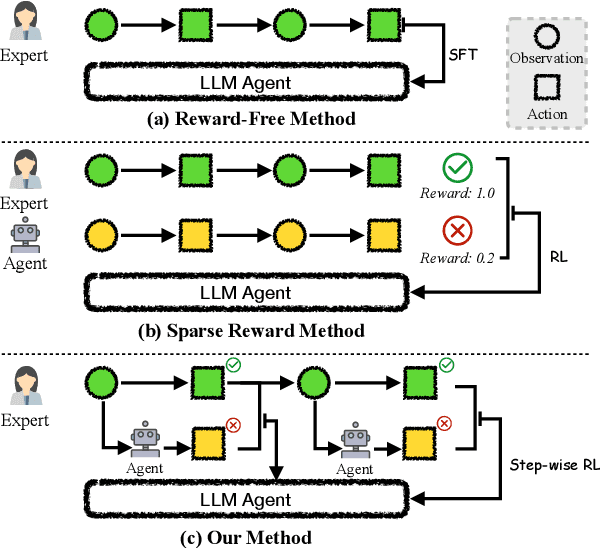
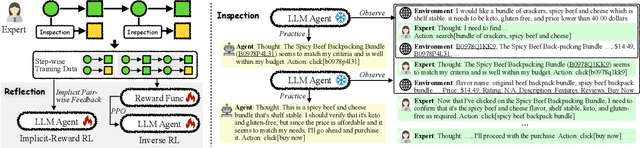
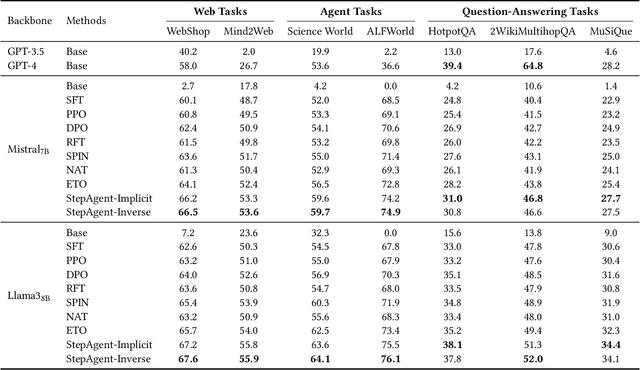
The outstanding capabilities of large language models (LLMs) render them a crucial component in various autonomous agent systems. While traditional methods depend on the inherent knowledge of LLMs without fine-tuning, more recent approaches have shifted toward the reinforcement learning strategy to further enhance agents' ability to solve complex interactive tasks with environments and tools. However, previous approaches are constrained by the sparse reward issue, where existing datasets solely provide a final scalar reward for each multi-step reasoning chain, potentially leading to ineffectiveness and inefficiency in policy learning. In this paper, we introduce StepAgent, which utilizes step-wise reward to optimize the agent's reinforcement learning process. Inheriting the spirit of novice-to-expert theory, we first compare the actions of the expert and the agent to automatically generate intermediate rewards for fine-grained optimization. Additionally, we propose implicit-reward and inverse reinforcement learning techniques to facilitate agent reflection and policy adjustment. Further theoretical analysis demonstrates that the action distribution of the agent can converge toward the expert action distribution over multiple training cycles. Experimental results across various datasets indicate that StepAgent outperforms existing baseline methods.