 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Statistical Framework for Alignment with Biased AI Feedback
Feb 09, 2026Modern alignment pipelines are increasingly replacing expensive human preference labels with evaluations from large language models (LLM-as-Judge). However, AI labels can be systematically biased compared to high-quality human feedback datasets. In this paper, we develop two debiased alignment methods within a general framework that accommodates heterogeneous prompt-response distributions and external human feedback sources. Debiased Direct Preference Optimization (DDPO) augments standard DPO with a residual-based correction and density-ratio reweighting to mitigate systematic bias, while retaining DPO's computational efficiency. Debiased Identity Preference Optimization (DIPO) directly estimates human preference probabilities without imposing a parametric reward model. We provide theoretical guarantees for both methods: DDPO offers a practical and computationally efficient solution for large-scale alignment, whereas DIPO serves as a robust, statistically optimal alternative that attains the semiparametric efficiency bound. Empirical studies on sentiment generation, summarization, and single-turn dialogue demonstrate that the proposed methods substantially improve alignment efficiency and recover performance close to that of an oracle trained on fully human-labeled data.
Analyzing 16,193 LLM Papers for Fun and Profits
Apr 15, 2025Large Language Models (LLMs) are reshaping the landscape of computer science research, driving significant shifts in research priorities across diverse conferences and fields. This study provides a comprehensive analysis of the publication trend of LLM-related papers in 77 top-tier computer science conferences over the past six years (2019-2024). We approach this analysis from four distinct perspectives: (1) We investigate how LLM research is driving topic shifts within major conferences. (2) We adopt a topic modeling approach to identify various areas of LLM-related topic growth and reveal the topics of concern at different conferences. (3) We explore distinct contribution patterns of academic and industrial institutions. (4) We study the influence of national origins on LLM development trajectories. Synthesizing the findings from these diverse analytical angles, we derive ten key insights that illuminate the dynamics and evolution of the LLM research ecosystem.
Elevator, Escalator or Neither? Classifying Pedestrian Conveyor State Using Inertial Navigation System
May 06, 2024



Classifying a pedestrian in one of the three conveyor states of "elevator," "escalator" and "neither" is fundamental to many applications such as indoor localization and people flow analysis. We estimate, for the first time, the pedestrian conveyor state given the inertial navigation system (INS) readings of accelerometer, gyroscope and magnetometer sampled from the phone. Our problem is challenging because the INS signals of the conveyor state are coupled and perturbed by unpredictable arbitrary human actions, confusing the decision process. We propose ELESON, a novel, effective and lightweight INS-based deep learning approach to classify whether a pedestrian is in an elevator, escalator or neither. ELESON utilizes a motion feature extractor to decouple the conveyor state from human action in the feature space, and a magnetic feature extractor to account for the speed difference between elevator and escalator. Given the results of the extractors, it employs an evidential state classifier to estimate the confidence of the pedestrian states. Based on extensive experiments conducted on twenty hours of real pedestrian data, we demonstrate that ELESON outperforms significantly the state-of-the-art approaches (where combined INS signals of both the conveyor state and human actions are processed together), with 15% classification improvement in F1 score, stronger confidence discriminability with 10% increase in AUROC (Area Under the Receiver Operating Characteristics), and low computational and memory requirements on smartphones.
Target-agnostic Source-free Domain Adaptation for Regression Tasks
Dec 01, 2023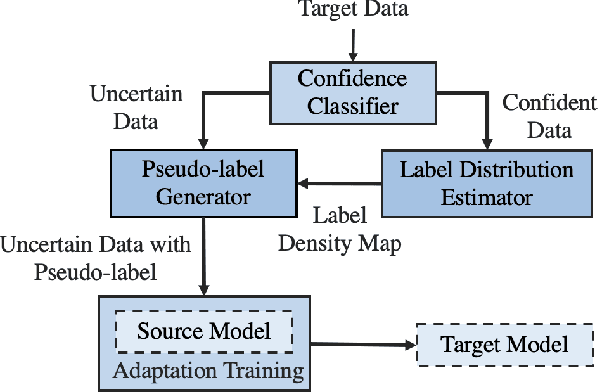

Unsupervised domain adaptation (UDA) seeks to bridge the domain gap between the target and source using unlabeled target data. Source-free UDA removes the requirement for labeled source data at the target to preserve data privacy and storage. However, work on source-free UDA assumes knowledge of domain gap distribution, and hence is limited to either target-aware or classification task. To overcome it, we propose TASFAR, a novel target-agnostic source-free domain adaptation approach for regression tasks. Using prediction confidence, TASFAR estimates a label density map as the target label distribution, which is then used to calibrate the source model on the target domain. We have conducted extensive experiments on four regression tasks with various domain gaps, namely, pedestrian dead reckoning for different users, image-based people counting in different scenes, housing-price prediction at different districts, and taxi-trip duration prediction from different departure points. TASFAR is shown to substantially outperform the state-of-the-art source-free UDA approaches by averagely reducing 22% errors for the four tasks and achieve notably comparable accuracy as source-based UDA without using source data.