 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXRoboToolkit: A Cross-Platform Framework for Robot Teleoperation
Jul 31, 2025
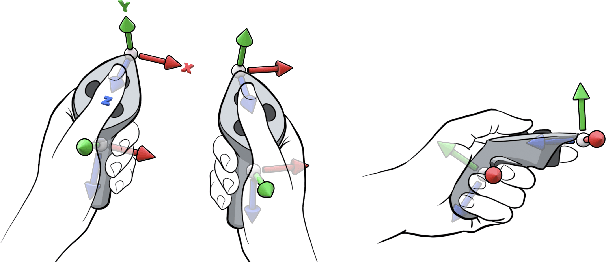


The rapid advancement of Vision-Language-Action models has created an urgent need for large-scale, high-quality robot demonstration datasets. Although teleoperation is the predominant method for data collection, current approaches suffer from limited scalability, complex setup procedures, and suboptimal data quality. This paper presents XRoboToolkit, a cross-platform framework for extended reality based robot teleoperation built on the OpenXR standard. The system features low-latency stereoscopic visual feedback, optimization-based inverse kinematics, and support for diverse tracking modalities including head, controller, hand, and auxiliary motion trackers. XRoboToolkit's modular architecture enables seamless integration across robotic platforms and simulation environments, spanning precision manipulators, mobile robots, and dexterous hands. We demonstrate the framework's effectiveness through precision manipulation tasks and validate data quality by training VLA models that exhibit robust autonomous performance.
A Survey of Optimization-based Task and Motion Planning: From Classical To Learning Approaches
Apr 05, 2024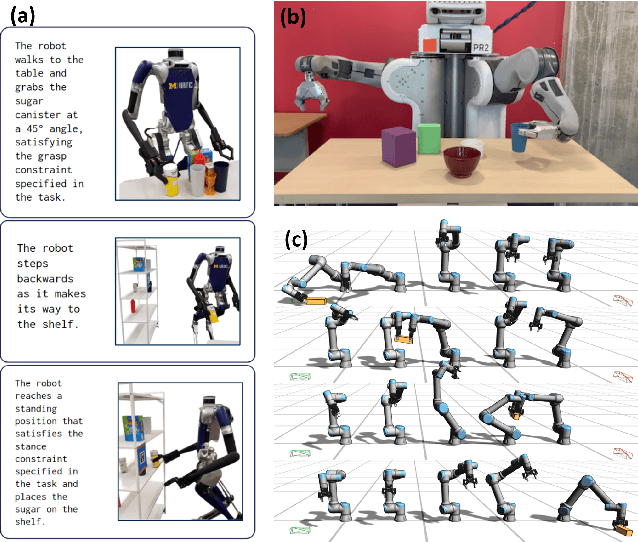
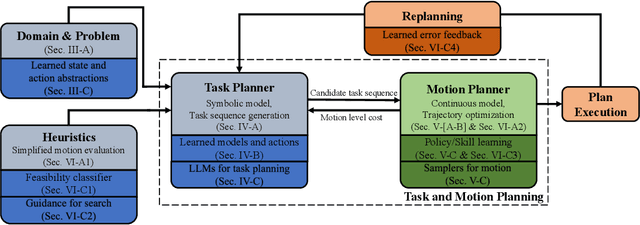
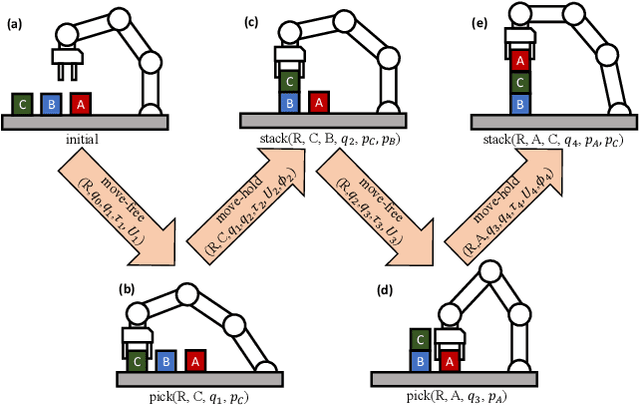
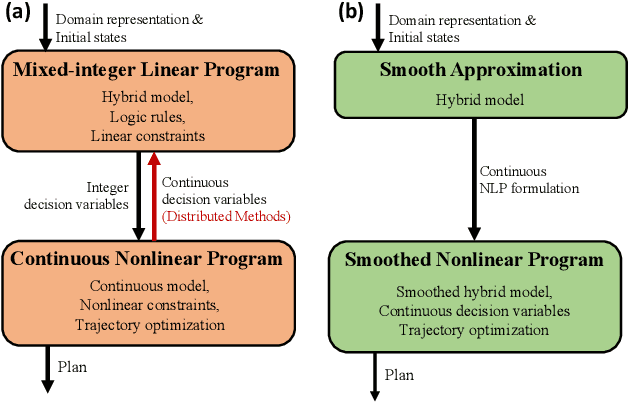
Task and Motion Planning (TAMP) integrates high-level task planning and low-level motion planning to equip robots with the autonomy to effectively reason over long-horizon, dynamic tasks. Optimization-based TAMP focuses on hybrid optimization approaches that define goal conditions via objective functions and are capable of handling open-ended goals, robotic dynamics, and physical interaction between the robot and the environment. Therefore, optimization-based TAMP is particularly suited to solve highly complex, contact-rich locomotion and manipulation problems. This survey provides a comprehensive review on optimization-based TAMP, covering (i) planning domain representations, including action description languages and temporal logic, (ii) individual solution strategies for components of TAMP, including AI planning and trajectory optimization (TO), and (iii) the dynamic interplay between logic-based task planning and model-based TO. A particular focus of this survey is to highlight the algorithm structures to efficiently solve TAMP, especially hierarchical and distributed approaches. Additionally, the survey emphasizes the synergy between the classical methods and contemporary learning-based innovations such as large language models. Furthermore, the future research directions for TAMP is discussed in this survey, highlighting both algorithmic and application-specific challenges.
Integrating Reconfigurable Foot Design, Multi-modal Contact Sensing, and Terrain Classification for Bipedal Locomotion
Apr 19, 2023



The ability of bipedal robots to adapt to diverse and unstructured terrain conditions is crucial for their deployment in real-world environments. To this end, we present a novel, bio-inspired robot foot design with stabilizing tarsal segments and a multifarious sensor suite involving acoustic, capacitive, tactile, temperature, and acceleration sensors. A real-time signal processing and terrain classification system is developed and evaluated. The sensed terrain information is used to control actuated segments of the foot, leading to improved ground contact and stability. The proposed framework highlights the potential of the sensor-integrated adaptive foot for intelligent and adaptive locomotion.
Adversarially Regularized Policy Learning Guided by Trajectory Optimization
Sep 16, 2021
Recent advancement in combining trajectory optimization with function approximation (especially neural networks) shows promise in learning complex control policies for diverse tasks in robot systems. Despite their great flexibility, the large neural networks for parameterizing control policies impose significant challenges. The learned neural control policies are often overcomplex and non-smooth, which can easily cause unexpected or diverging robot motions. Therefore, they often yield poor generalization performance in practice. To address this issue, we propose adVErsarially Regularized pOlicy learNIng guided by trajeCtory optimizAtion (VERONICA) for learning smooth control policies. Specifically, our proposed approach controls the smoothness (local Lipschitz continuity) of the neural control policies by stabilizing the output control with respect to the worst-case perturbation to the input state. Our experiments on robot manipulation show that our proposed approach not only improves the sample efficiency of neural policy learning but also enhances the robustness of the policy against various types of disturbances, including sensor noise, environmental uncertainty, and model mismatch.
BEAUTY Powered BEAST
Mar 11, 2021
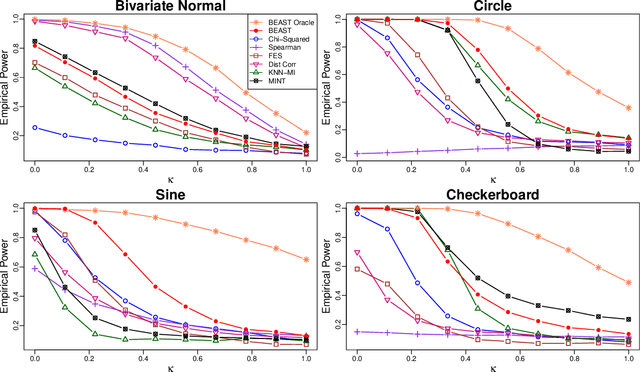


We study inference about the uniform distribution with the proposed binary expansion approximation of uniformity (BEAUTY) approach. Through an extension of the celebrated Euler's formula, we approximate the characteristic function of any copula distribution with a linear combination of means of binary interactions from marginal binary expansions. This novel characterization enables a unification of many important existing tests through an approximation from some quadratic form of symmetry statistics, where the deterministic weight matrix characterizes the power properties of each test. To achieve a uniformly high power, we study test statistics with data-adaptive weights through an oracle approach, referred to as the binary expansion adaptive symmetry test (BEAST). By utilizing the properties of the binary expansion filtration, we show that the Neyman-Pearson test of uniformity can be approximated by an oracle weighted sum of symmetry statistics. The BEAST with this oracle leads all existing tests we considered in empirical power against all complex forms of alternatives. This oracle therefore sheds light on the potential of substantial improvements in power and on the form of optimal weights under each alternative. By approximating this oracle with data-adaptive weights, we develop the BEAST that improves the empirical power of many existing tests against a wide spectrum of common alternatives while providing clear interpretation of the form of non-uniformity upon rejection. We illustrate the BEAST with a study of the relationship between the location and brightness of stars.
SyDeBO: Symbolic-Decision-Embedded Bilevel Optimization for Long-Horizon Manipulation in Dynamic Environments
Oct 23, 2020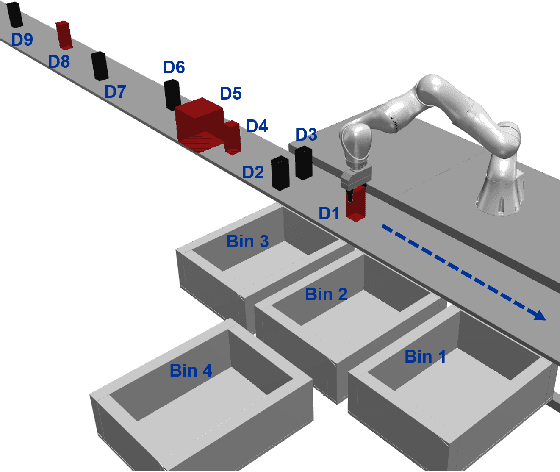
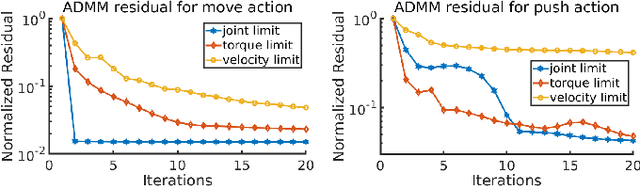
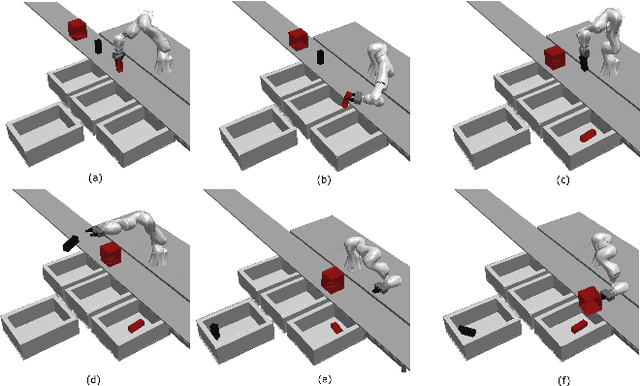

This study proposes a Task and Motion Planning (TAMP) method with symbolic decisions embedded in a bilevel optimization. This TAMP method exploits the discrete structure of sequential manipulation for long-horizon and versatile tasks in dynamically changing environments. At the symbolic planning level, we propose a scalable decision-making method for long-horizon manipulation tasks using the Planning Domain Definition Language (PDDL) with causal graph decomposition. At the motion planning level, we devise a trajectory optimization (TO) approach based on the Alternating Direction Method of Multipliers (ADMM), suitable for solving constrained, large-scale nonlinear optimization in a distributed manner. Distinct from conventional geometric motion planners, our approach generates highly dynamic manipulation motions by incorporating the full robot and object dynamics. Furthermore, in lieu of a hierarchical planning approach, we solve a holistically integrated bilevel optimization problem involving costs from both the low-level TO and the high-level search. Simulation and experimental results demonstrate dynamic manipulation for long-horizon object sorting tasks in clutter and on a moving conveyor belt.