 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-driven SpatioTemporal Graph KANsformer for Medical Examination Recommendation
May 12, 2025Recommendation systems in AI-based medical diagnostics and treatment constitute a critical component of AI in healthcare. Although some studies have explored this area and made notable progress, healthcare recommendation systems remain in their nascent stage. And these researches mainly target the treatment process such as drug or disease recommendations. In addition to the treatment process, the diagnostic process, particularly determining which medical examinations are necessary to evaluate the condition, also urgently requires intelligent decision support. To bridge this gap, we first formalize the task of medical examination recommendations. Compared to traditional recommendations, the medical examination recommendation involves more complex interactions. This complexity arises from two folds: 1) The historical medical records for examination recommendations are heterogeneous and redundant, which makes the recommendation results susceptible to noise. 2) The correlation between the medical history of patients is often irregular, making it challenging to model spatiotemporal dependencies. Motivated by the above observation, we propose a novel Diffusion-driven SpatioTemporal Graph KANsformer for Medical Examination Recommendation (DST-GKAN) with a two-stage learning paradigm to solve the above challenges. In the first stage, we exploit a task-adaptive diffusion model to distill recommendation-oriented information by reducing the noises in heterogeneous medical data. In the second stage, a spatiotemporal graph KANsformer is proposed to simultaneously model the complex spatial and temporal relationships. Moreover, to facilitate the medical examination recommendation research, we introduce a comprehensive dataset. The experimental results demonstrate the state-of-the-art performance of the proposed method compared to various competitive baselines.
CoCoDiff: Diversifying Skeleton Action Features via Coarse-Fine Text-Co-Guided Latent Diffusion
Apr 30, 2025In action recognition tasks, feature diversity is essential for enhancing model generalization and performance. Existing methods typically promote feature diversity by expanding the training data in the sample space, which often leads to inefficiencies and semantic inconsistencies. To overcome these problems, we propose a novel Coarse-fine text co-guidance Diffusion model (CoCoDiff). CoCoDiff generates diverse yet semantically consistent features in the latent space by leveraging diffusion and multi-granularity textual guidance. Specifically, our approach feeds spatio-temporal features extracted from skeleton sequences into a latent diffusion model to generate diverse action representations. Meanwhile, we introduce a coarse-fine text co-guided strategy that leverages textual information from large language models (LLMs) to ensure semantic consistency between the generated features and the original inputs. It is noted that CoCoDiff operates as a plug-and-play auxiliary module during training, incurring no additional inference cost. Extensive experiments demonstrate that CoCoDiff achieves SOTA performance on skeleton-based action recognition benchmarks, including NTU RGB+D, NTU RGB+D 120 and Kinetics-Skeleton.
Spatio-Temporal Progressive Attention Model for EEG Classification in Rapid Serial Visual Presentation Task
Feb 02, 2025



As a type of multi-dimensional sequential data, the spatial and temporal dependencies of electroencephalogram (EEG) signals should be further investigated. Thus, in this paper, we propose a novel spatial-temporal progressive attention model (STPAM) to improve EEG classification in rapid serial visual presentation (RSVP) tasks. STPAM first adopts three distinct spatial experts to learn the spatial topological information of brain regions progressively, which is used to minimize the interference of irrelevant brain regions. Concretely, the former expert filters out EEG electrodes in the relative brain regions to be used as prior knowledge for the next expert, ensuring that the subsequent experts gradually focus their attention on information from significant EEG electrodes. This process strengthens the effect of the important brain regions. Then, based on the above-obtained feature sequence with spatial information, three temporal experts are adopted to capture the temporal dependence by progressively assigning attention to the crucial EEG slices. Except for the above EEG classification method, in this paper, we build a novel Infrared RSVP EEG Dataset (IRED) which is based on dim infrared images with small targets for the first time, and conduct extensive experiments on it. The results show that our STPAM can achieve better performance than all the compared methods.
Adaptive Progressive Attention Graph Neural Network for EEG Emotion Recognition
Jan 24, 2025In recent years, numerous neuroscientific studies have shown that human emotions are closely linked to specific brain regions, with these regions exhibiting variability across individuals and emotional states. To fully leverage these neural patterns, we propose an Adaptive Progressive Attention Graph Neural Network (APAGNN), which dynamically captures the spatial relationships among brain regions during emotional processing. The APAGNN employs three specialized experts that progressively analyze brain topology. The first expert captures global brain patterns, the second focuses on region-specific features, and the third examines emotion-related channels. This hierarchical approach enables increasingly refined analysis of neural activity. Additionally, a weight generator integrates the outputs of all three experts, balancing their contributions to produce the final predictive label. Extensive experiments on three publicly available datasets (SEED, SEED-IV and MPED) demonstrate that the proposed method enhances EEG emotion recognition performance, achieving superior results compared to baseline methods.
Temporal Graph Modeling for Skeleton-based Action Recognition
Dec 16, 2020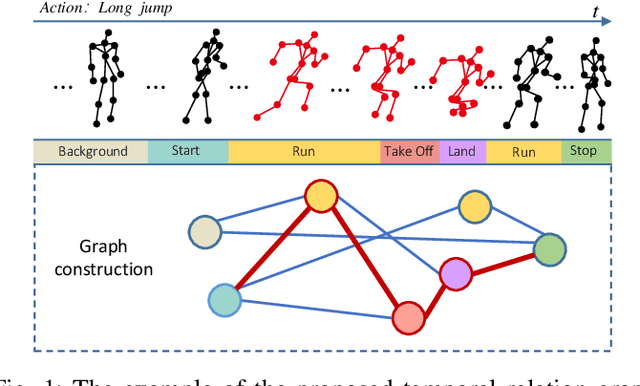
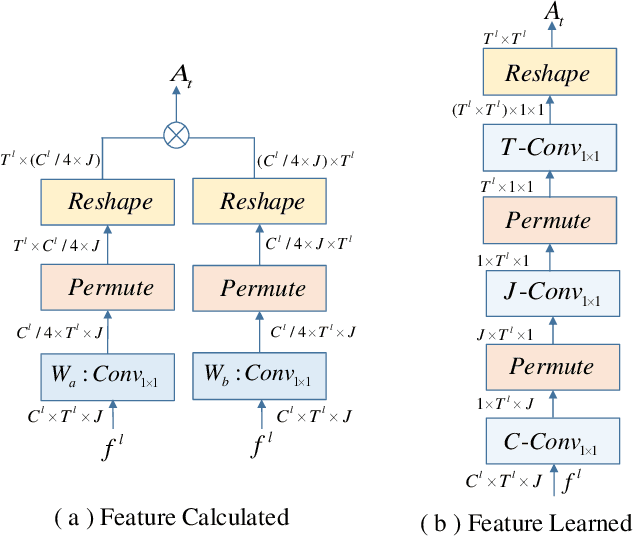
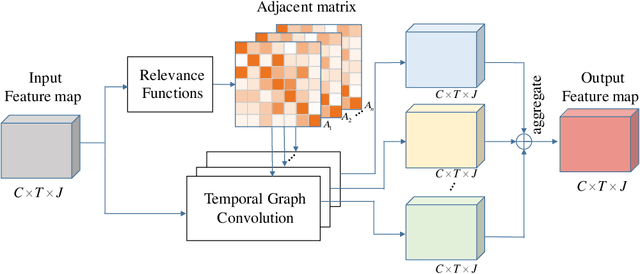
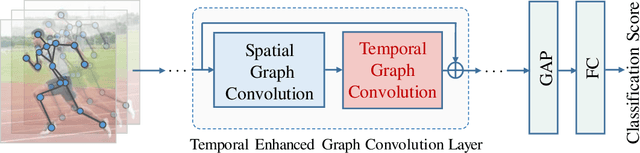
Graph Convolutional Networks (GCNs), which model skeleton data as graphs, have obtained remarkable performance for skeleton-based action recognition. Particularly, the temporal dynamic of skeleton sequence conveys significant information in the recognition task. For temporal dynamic modeling, GCN-based methods only stack multi-layer 1D local convolutions to extract temporal relations between adjacent time steps. With the repeat of a lot of local convolutions, the key temporal information with non-adjacent temporal distance may be ignored due to the information dilution. Therefore, these methods still remain unclear how to fully explore temporal dynamic of skeleton sequence. In this paper, we propose a Temporal Enhanced Graph Convolutional Network (TE-GCN) to tackle this limitation. The proposed TE-GCN constructs temporal relation graph to capture complex temporal dynamic. Specifically, the constructed temporal relation graph explicitly builds connections between semantically related temporal features to model temporal relations between both adjacent and non-adjacent time steps. Meanwhile, to further explore the sufficient temporal dynamic, multi-head mechanism is designed to investigate multi-kinds of temporal relations. Extensive experiments are performed on two widely used large-scale datasets, NTU-60 RGB+D and NTU-120 RGB+D. And experimental results show that the proposed model achieves the state-of-the-art performance by making contribution to temporal modeling for action recognition.
Real-Time Illegal Parking Detection System Based on Deep Learning
Oct 05, 2017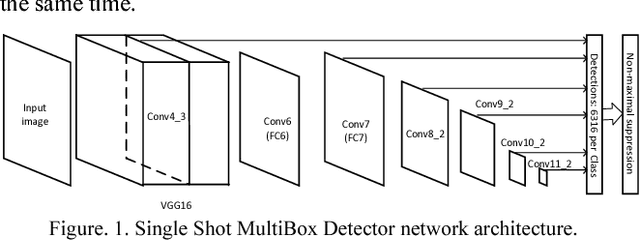
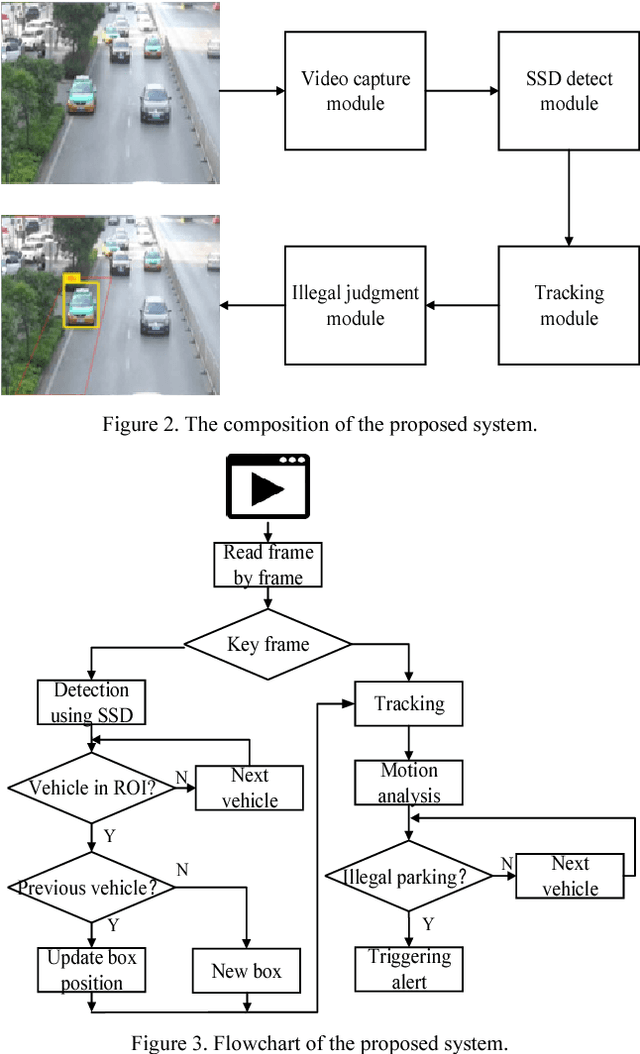
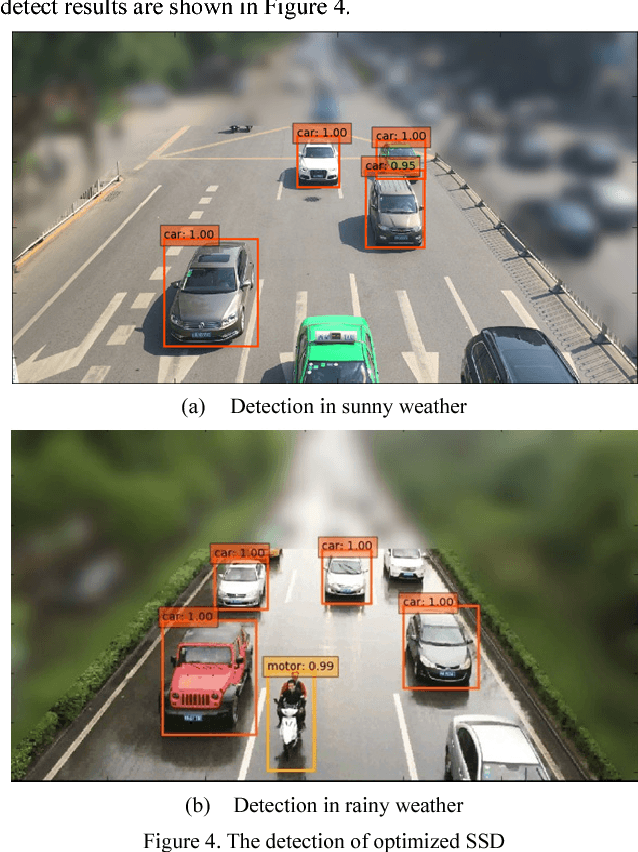
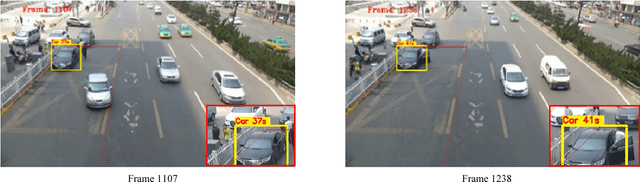
The increasing illegal parking has become more and more serious. Nowadays the methods of detecting illegally parked vehicles are based on background segmentation. However, this method is weakly robust and sensitive to environment. Benefitting from deep learning, this paper proposes a novel illegal vehicle parking detection system. Illegal vehicles captured by camera are firstly located and classified by the famous Single Shot MultiBox Detector (SSD) algorithm. To improve the performance, we propose to optimize SSD by adjusting the aspect ratio of default box to accommodate with our dataset better. After that, a tracking and analysis of movement is adopted to judge the illegal vehicles in the region of interest (ROI). Experiments show that the system can achieve a 99% accuracy and real-time (25FPS) detection with strong robustness in complex environments.
Adaptive Measurement Network for CS Image Reconstruction
Sep 23, 2017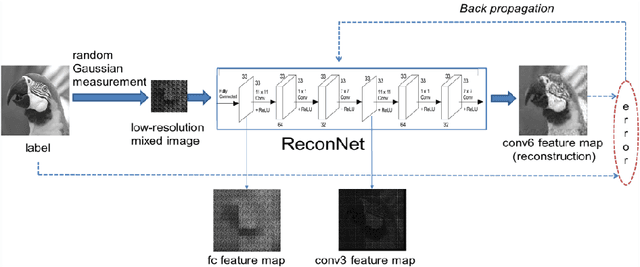
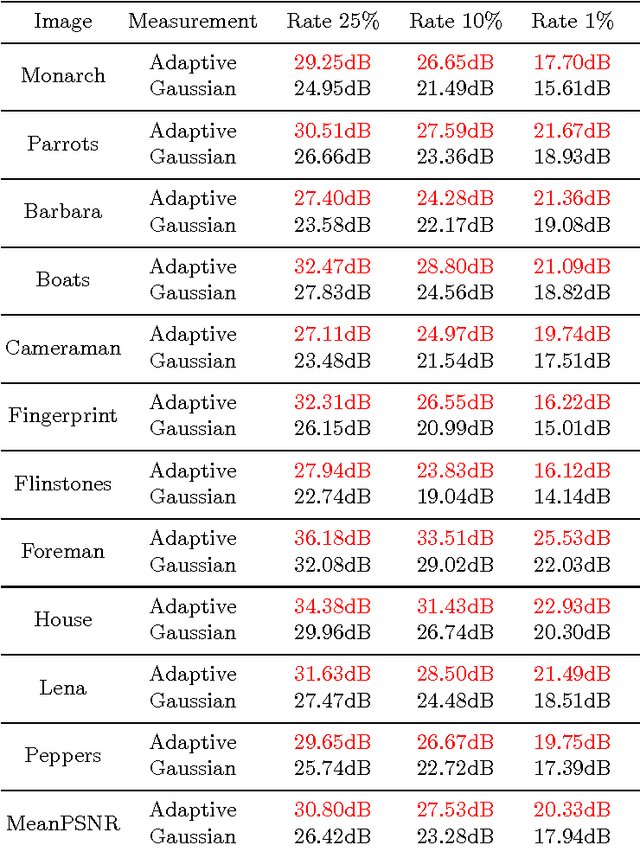
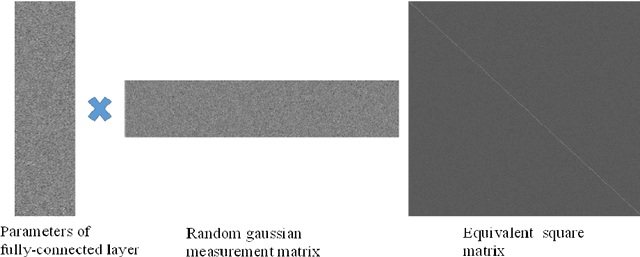
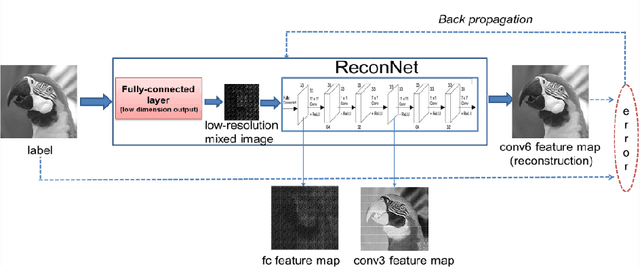
Conventional compressive sensing (CS) reconstruction is very slow for its characteristic of solving an optimization problem. Convolu- tional neural network can realize fast processing while achieving compa- rable results. While CS image recovery with high quality not only de- pends on good reconstruction algorithms, but also good measurements. In this paper, we propose an adaptive measurement network in which measurement is obtained by learning. The new network consists of a fully-connected layer and ReconNet. The fully-connected layer which has low-dimension output acts as measurement. We train the fully-connected layer and ReconNet simultaneously and obtain adaptive measurement. Because the adaptive measurement fits dataset better, in contrast with random Gaussian measurement matrix, under the same measuremen- t rate, it can extract the information of scene more efficiently and get better reconstruction results. Experiments show that the new network outperforms the original one.