 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEO-WM: A Physically Informed World Model for Probabilistic Earth Observation Forecasting
Jun 25, 2026Earth Observation (EO) forecasting aims to predict future Earth surface dynamics from satellite observations under changing meteorological conditions. In this paper, we view this task as a partially observed, weather-driven world modeling problem, in which weather acts as a conditioning signal, while forecasting remains uncertain due to sparse observations and unobserved land-surface states. However, existing methods do not fully capture this setting: deterministic models collapse uncertainty into a single future prediction, while diffusion-based methods typically treat weather variables as undifferentiated conditioning signals, and existing benchmarks focus mainly on reconstruction accuracy rather than whether forecasts respond correctly to changed weather forcing.We introduce EO-WM, a video diffusion transformer for multispectral EO forecasting. EO-WM incorporates a physically informed conditioning framework that represents meteorological forcing through a climatological baseline, weather anomalies, and cumulative physical stress signals. Specifically, it separates baseline and anomaly through distinct conditioning pathways, and accumulates anomalous forcing over time to capture sustained heat and drought stress. To evaluate weather-response behavior beyond standard metrics, we introduce two diagnostic benchmarks: an Extreme Summer Benchmark for severity-aware prediction of vegetation degradation under extreme weather, and a Seasonal Matched-Pair Benchmark for testing response fidelity under changed weather forcing. Experiments show that EO-WM reduces the error in predicted Normalized Difference Vegetation Index (NDVI) decline amplitude by a relative 5.63% and improves directional hit rate by a relative 7.80%, while remaining competitive on standard pixel-level metrics. The benchmarks and model will be made open-source at https://github.com/Luo-Z13/EO-WM.
FASTER: Rethinking Real-Time Flow VLAs
Mar 19, 2026Real-time execution is crucial for deploying Vision-Language-Action (VLA) models in the physical world. Existing asynchronous inference methods primarily optimize trajectory smoothness, but neglect the critical latency in reacting to environmental changes. By rethinking the notion of reaction in action chunking policies, this paper presents a systematic analysis of the factors governing reaction time. We show that reaction time follows a uniform distribution determined jointly by the Time to First Action (TTFA) and the execution horizon. Moreover, we reveal that the standard practice of applying a constant schedule in flow-based VLAs can be inefficient and forces the system to complete all sampling steps before any movement can start, forming the bottleneck in reaction latency. To overcome this issue, we propose Fast Action Sampling for ImmediaTE Reaction (FASTER). By introducing a Horizon-Aware Schedule, FASTER adaptively prioritizes near-term actions during flow sampling, compressing the denoising of the immediate reaction by tenfold (e.g., in $π_{0.5}$ and X-VLA) into a single step, while preserving the quality of long-horizon trajectory. Coupled with a streaming client-server pipeline, FASTER substantially reduces the effective reaction latency on real robots, especially when deployed on consumer-grade GPUs. Real-world experiments, including a highly dynamic table tennis task, prove that FASTER unlocks unprecedented real-time responsiveness for generalist policies, enabling rapid generation of accurate and smooth trajectories.
GenieDrive: Towards Physics-Aware Driving World Model with 4D Occupancy Guided Video Generation
Dec 14, 2025Physics-aware driving world model is essential for drive planning, out-of-distribution data synthesis, and closed-loop evaluation. However, existing methods often rely on a single diffusion model to directly map driving actions to videos, which makes learning difficult and leads to physically inconsistent outputs. To overcome these challenges, we propose GenieDrive, a novel framework designed for physics-aware driving video generation. Our approach starts by generating 4D occupancy, which serves as a physics-informed foundation for subsequent video generation. 4D occupancy contains rich physical information, including high-resolution 3D structures and dynamics. To facilitate effective compression of such high-resolution occupancy, we propose a VAE that encodes occupancy into a latent tri-plane representation, reducing the latent size to only 58% of that used in previous methods. We further introduce Mutual Control Attention (MCA) to accurately model the influence of control on occupancy evolution, and we jointly train the VAE and the subsequent prediction module in an end-to-end manner to maximize forecasting accuracy. Together, these designs yield a 7.2% improvement in forecasting mIoU at an inference speed of 41 FPS, while using only 3.47 M parameters. Additionally, a Normalized Multi-View Attention is introduced in the video generation model to generate multi-view driving videos with guidance from our 4D occupancy, significantly improving video quality with a 20.7% reduction in FVD. Experiments demonstrate that GenieDrive enables highly controllable, multi-view consistent, and physics-aware driving video generation.
ClipGS: Clippable Gaussian Splatting for Interactive Cinematic Visualization of Volumetric Medical Data
Jul 09, 2025The visualization of volumetric medical data is crucial for enhancing diagnostic accuracy and improving surgical planning and education. Cinematic rendering techniques significantly enrich this process by providing high-quality visualizations that convey intricate anatomical details, thereby facilitating better understanding and decision-making in medical contexts. However, the high computing cost and low rendering speed limit the requirement of interactive visualization in practical applications. In this paper, we introduce ClipGS, an innovative Gaussian splatting framework with the clipping plane supported, for interactive cinematic visualization of volumetric medical data. To address the challenges posed by dynamic interactions, we propose a learnable truncation scheme that automatically adjusts the visibility of Gaussian primitives in response to the clipping plane. Besides, we also design an adaptive adjustment model to dynamically adjust the deformation of Gaussians and refine the rendering performance. We validate our method on five volumetric medical data (including CT and anatomical slice data), and reach an average 36.635 PSNR rendering quality with 156 FPS and 16.1 MB model size, outperforming state-of-the-art methods in rendering quality and efficiency.
Efficient Data-driven Scene Simulation using Robotic Surgery Videos via Physics-embedded 3D Gaussians
May 02, 2024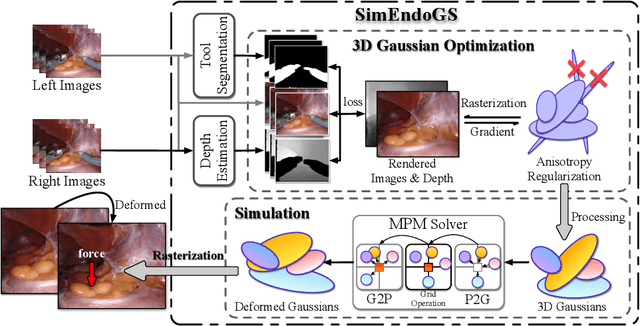

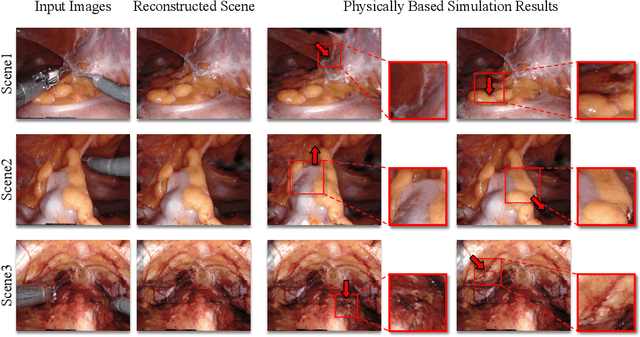
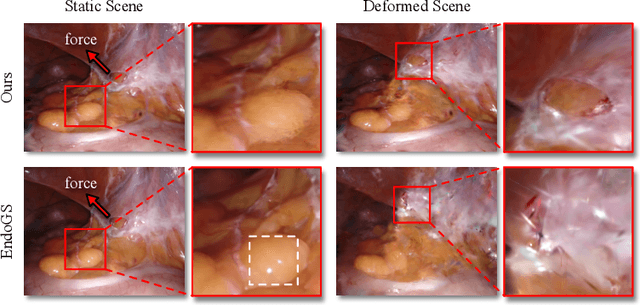
Surgical scene simulation plays a crucial role in surgical education and simulator-based robot learning. Traditional approaches for creating these environments with surgical scene involve a labor-intensive process where designers hand-craft tissues models with textures and geometries for soft body simulations. This manual approach is not only time-consuming but also limited in the scalability and realism. In contrast, data-driven simulation offers a compelling alternative. It has the potential to automatically reconstruct 3D surgical scenes from real-world surgical video data, followed by the application of soft body physics. This area, however, is relatively uncharted. In our research, we introduce 3D Gaussian as a learnable representation for surgical scene, which is learned from stereo endoscopic video. To prevent over-fitting and ensure the geometrical correctness of these scenes, we incorporate depth supervision and anisotropy regularization into the Gaussian learning process. Furthermore, we apply the Material Point Method, which is integrated with physical properties, to the 3D Gaussians to achieve realistic scene deformations. Our method was evaluated on our collected in-house and public surgical videos datasets. Results show that it can reconstruct and simulate surgical scenes from endoscopic videos efficiently-taking only a few minutes to reconstruct the surgical scene-and produce both visually and physically plausible deformations at a speed approaching real-time. The results demonstrate great potential of our proposed method to enhance the efficiency and variety of simulations available for surgical education and robot learning.
Efficient Physically-based Simulation of Soft Bodies in Embodied Environment for Surgical Robot
Feb 02, 2024Surgical robot simulation platform plays a crucial role in enhancing training efficiency and advancing research on robot learning. Much effort have been made by scholars on developing open-sourced surgical robot simulators to facilitate research. We also developed SurRoL formerly, an open-source, da Vinci Research Kit (dVRK) compatible and interactive embodied environment for robot learning. Despite its advancements, the simulation of soft bodies still remained a major challenge within the open-source platforms available for surgical robotics. To this end, we develop an interactive physically based soft body simulation framework and integrate it to SurRoL. Specifically, we utilized a high-performance adaptation of the Material Point Method (MPM) along with the Neo-Hookean model to represent the deformable tissue. Lagrangian particles are used to track the motion and deformation of the soft body throughout the simulation and Eulerian grids are leveraged to discretize space and facilitate the calculation of forces, velocities, and other physical quantities. We also employed an efficient collision detection and handling strategy to simulate the interaction between soft body and rigid tool of the surgical robot. By employing the Taichi programming language, our implementation harnesses parallel computing to boost simulation speed. Experimental results show that our platform is able to simulate soft bodies efficiently with strong physical interpretability and plausible visual effects. These new features in SurRoL enable the efficient simulation of surgical tasks involving soft tissue manipulation and pave the path for further investigation of surgical robot learning. The code will be released in a new branch of SurRoL github repo.