 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnsite Non-Line-of-Sight Imaging via Online Calibrations
Dec 29, 2021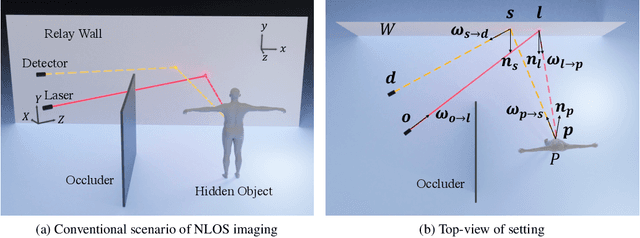
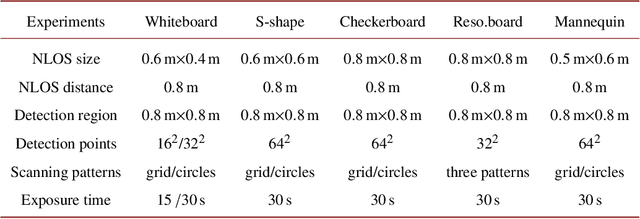
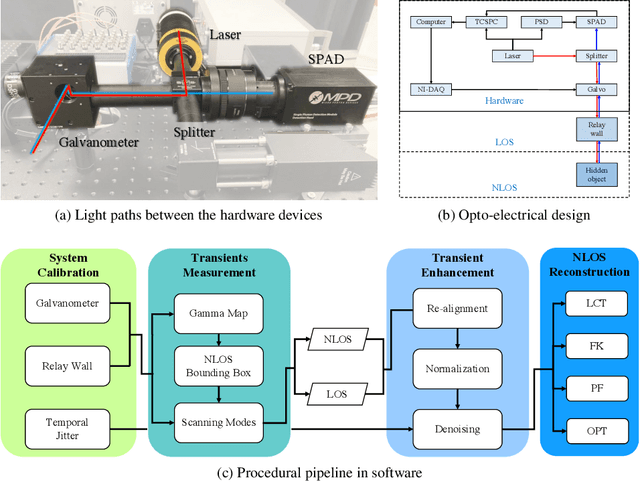
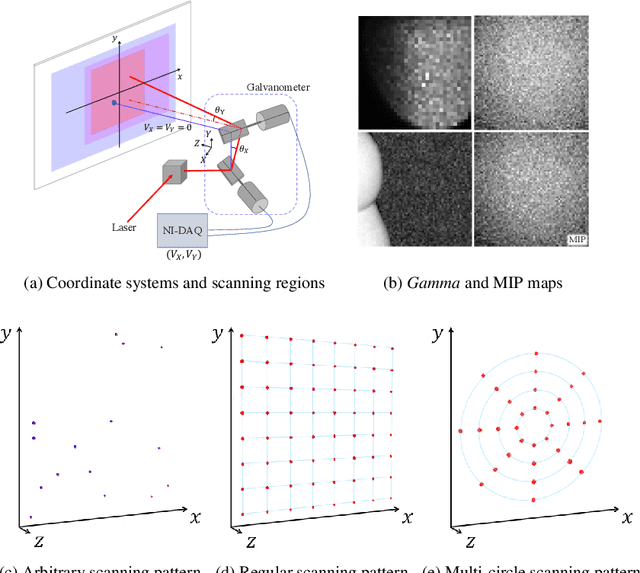
There has been an increasing interest in deploying non-line-of-sight (NLOS) imaging systems for recovering objects behind an obstacle. Existing solutions generally pre-calibrate the system before scanning the hidden objects. Onsite adjustments of the occluder, object and scanning pattern require re-calibration. We present an online calibration technique that directly decouples the acquired transients at onsite scanning into the LOS and hidden components. We use the former to directly (re)calibrate the system upon changes of scene/obstacle configurations, scanning regions, and scanning patterns whereas the latter for hidden object recovery via spatial, frequency or learning based techniques. Our technique avoids using auxiliary calibration apparatus such as mirrors or checkerboards and supports both laboratory validations and real-world deployments.
Non-line-of-Sight Imaging via Neural Transient Fields
Jan 05, 2021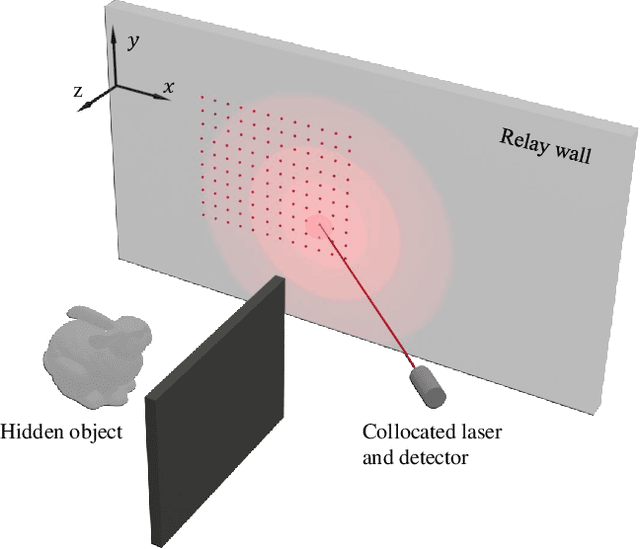
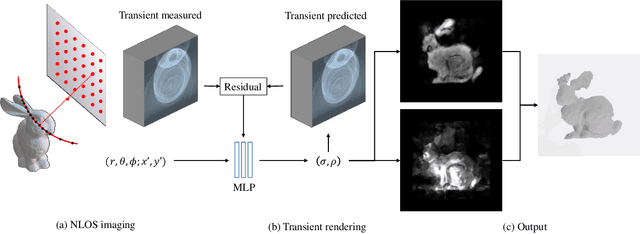
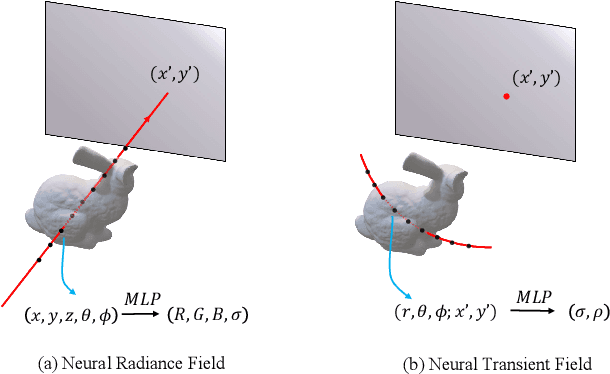
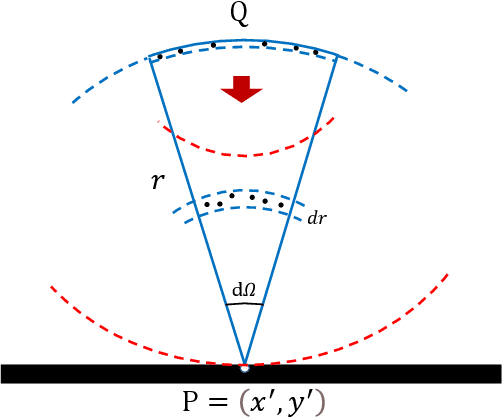
We present a neural modeling framework for Non-Line-of-Sight (NLOS) imaging. Previous solutions have sought to explicitly recover the 3D geometry (e.g., as point clouds) or voxel density (e.g., within a pre-defined volume) of the hidden scene. In contrast, inspired by the recent Neural Radiance Field (NeRF) approach, we use a multi-layer perceptron (MLP) to represent the neural transient field or NeTF. However, NeTF measures the transient over spherical wavefronts rather than the radiance along lines. We therefore formulate a spherical volume NeTF reconstruction pipeline, applicable to both confocal and non-confocal setups. Compared with NeRF, NeTF samples a much sparser set of viewpoints (scanning spots) and the sampling is highly uneven. We thus introduce a Monte Carlo technique to improve the robustness in the reconstruction. Comprehensive experiments on synthetic and real datasets demonstrate NeTF provides higher quality reconstruction and preserves fine details largely missing in the state-of-the-art.